轮廓检测
1. 轮廓检测
前言
轮廓可简单理解为由连续边界点连接而成的曲线,这些点具有相同或相近的颜色/灰度,是图像目标的外部特征,对图像分析、目标识别及理解等深层处理意义重大。
轮廓提取基本原理
针对背景黑、目标白的二值图像,提取逻辑为:若找到某白色点且其8邻域(或4邻域)均为白色,则该点为目标内部点,需置为黑色(视觉上相当于“掏空”内部);否则保持白色——此类白色点即为目标的轮廓点。通常,寻找轮廓前需通过阈值化或Canny边缘检测将图像转为二值图。
边缘提取与轮廓检测的区别 👇
- 边缘提取:聚焦图像中像素点的明暗突变(梯度变化大的位置),偏向底层像素级变化。例如Canny边缘检测,结果保存为与源图同尺寸、同类型的“边缘图”(仅标记边缘位置)。
- 轮廓检测:聚焦对象的语义边界,偏向高层目标级特征。例如OpenCV的findContours()函数,会输出每个轮廓的点向量(记录边界坐标),还会提供图像的拓扑信息(如某轮廓的前/后一个轮廓索引)。
查找轮廓Api:
cv2.findContours(image, mode, method[, contours[, hierarchy[, offset]]])
参数说明:
- image:输入图像,单通道,8位或32位。
- mode:轮廓检索模式,决定了轮廓的层次结构。 四种方式:cv2.RETR_EXTERNAL(只检索最外面的轮廓)、cv2.RETR_LIST(检索所有的轮廓,但不建立轮廓之间的层次结构)、cv2.RETR_CCOMP(检索所有的轮廓,并将它们组织成两级层次结构。顶层是外部边界,第二层是内部边界)、cv2.RETR_TREE(检索所有的轮廓,并将它们组织成嵌套的层次结构)。
- method:轮廓近似方法,决定了如何对轮廓进行近似。有两种方式:cv2.CHAIN_APPROX_NONE:存储所有的轮廓点,相邻的两个点的像素位置差不超过1。
cv2.CHAIN_APPROX_SIMPLE:压缩⽔平⽅向,垂直⽅向,对⻆线⽅向的元素,只保留该⽅向的终点坐标,例如⼀个矩形轮廓只需4个点来保存轮廓信。如下图5所示
返回值:
- image:输入图像的副本,轮廓被绘制在该图像上。
- contours:轮廓的列表,每个轮廓都是一个Numpy数组,表示轮廓的边界点。
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 图像读取
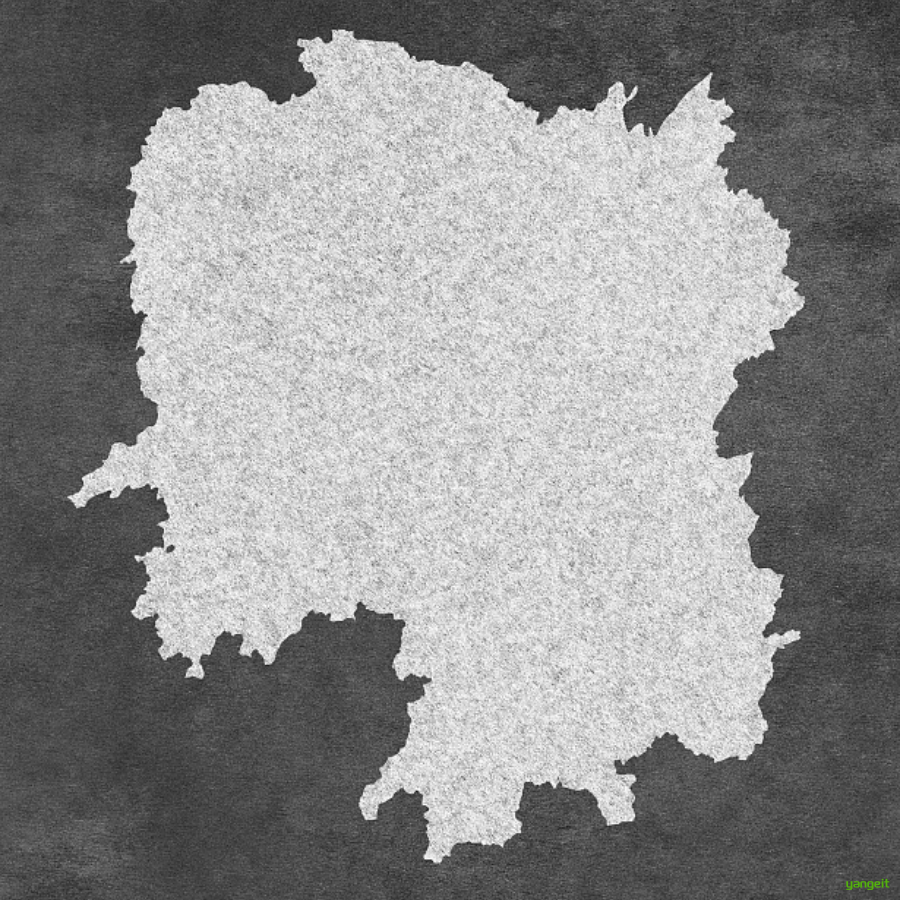
img = cv.imread('./img/hunan.png')
imgray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 2 边缘检测
canny = cv.Canny(imgray, 127, 255, 0)
# 3 轮廓提取
contours, hierarchy = cv.findContours(canny, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
# 4 找到面积最大的前10个轮廓
if len(contours) > 0:
# 计算每个轮廓的面积,并保留索引信息
areas_with_index = [(cv.contourArea(contour), idx) for idx, contour in enumerate(contours)]
# 按面积降序排序
areas_with_index.sort(reverse=True, key=lambda x: x[0])
# 获取前4大的轮廓索引
top_10_indices = [idx for area, idx in areas_with_index[:4]]
top_10_areas = [area for area, idx in areas_with_index[:4]]
print(f"找到 {len(contours)} 个轮廓")
# 方法:用同一种颜色绘制所有轮廓
result_img2 = img.copy()
for contour_idx in top_10_indices:
img_with_contours_same_color = cv.drawContours(result_img2, contours, contour_idx, (0, 0, 255), 2)
else:
print("未找到任何轮廓")
# 5 图像显示
plt.figure(figsize=(20, 10))
plt.subplot(231), plt.imshow(cv.cvtColor(img, cv.COLOR_BGR2RGB))
plt.title('原始图像'), plt.axis('off')
plt.subplot(232), plt.imshow(canny, cmap='gray')
plt.title('Canny边缘检测'), plt.axis('off')
plt.subplot(234), plt.imshow(cv.cvtColor(img_with_contours_same_color, cv.COLOR_BGR2RGB))
plt.title('前10大轮廓(同色)'), plt.axis('off')
plt.tight_layout()
plt.show()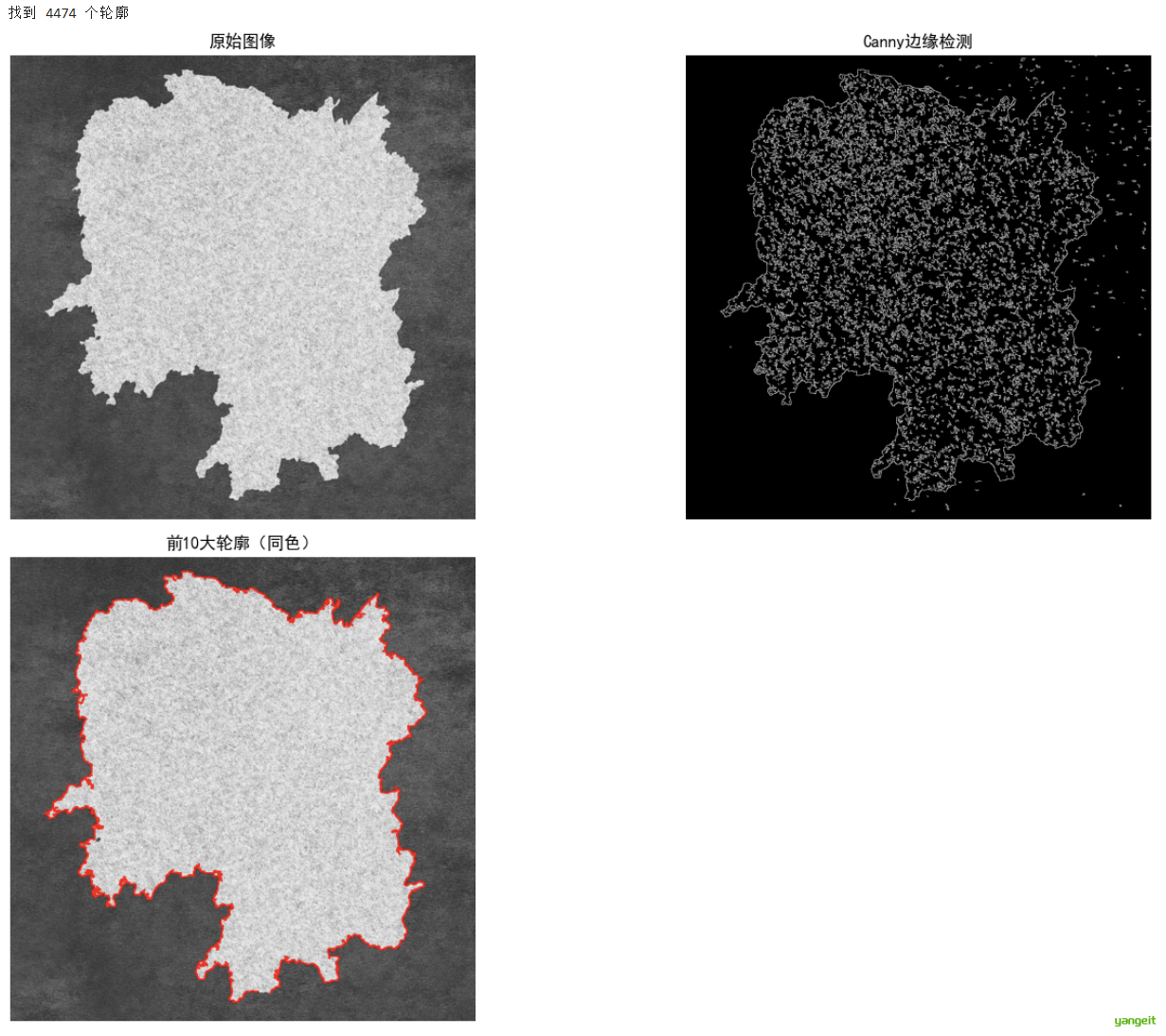
2. 不变矩
前言
2. 不变矩:几何特征的升级版
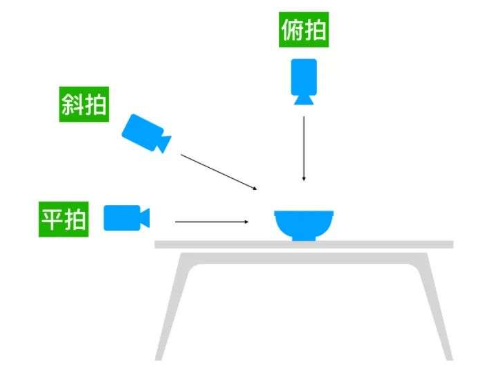
几何特征虽然直观,但有一个明显缺点:对变换敏感 。比如你拍一张正方形的照片,如果手机倾斜拍摄(旋转)、站远一点(缩小)或移动位置(平移),它的“面积”“周长”数值可能不变,但“质心位置”“方向”会变——如果直接用原始几何特征(比如“边界的方向”),不同拍摄条件下的同一个正方形会被误判成不同形状。
矩:是概率论和统计学中用来描述数据分布特征的量,它反映了数据在各个位置上的加权平均。矩可以用来描述数据的集中趋势、离散程度、对称性等特性。矩的作用:用数学数字概括物体的形状。
但现实中,我们看物体常会「变角度」:
- 猫可能站着、躺着、侧身(旋转);
- 拍照时手抖歪了(倾斜);
- 离得近拍显大,离得远拍显小(缩放);
- 甚至镜子里的倒影(镜像)。
普通的「矩」 会跟着这些变化变:比如猫躺下了,重心位置变了,普通矩的值也会变,那我们用这组数字去识别猫时,就会认不出来 。
不变矩就是为了解决这个问题诞生的:它是一组特殊的几何特征,无论形状如何平移、旋转或缩放,这些特征的数值都保持不变。就像给形状办了一张“身份证”,无论它怎么动、怎么变,身份证上的关键信息(如指纹)始终一致。
常用的不变矩是 7个, 这里不列举数学公式(要看公式,教材的186页),但可以粗糙理解为它们分别对应:
- 描述“整体大小 ”的归一化特征;
- 描述“x/y方向胖瘦比例 ”的特征;
- 描述“倾斜程度 ”的特征;
- 描述“x方向对称性 ”的特征;
- 描述“y方向对称性 ”的特征;
- 描述“综合倾斜+对称性 ”的特征;
- 描述“高阶细节(如凹凸)”的特征。
例题9-1 对图像进行各种几何变换,观察不变矩的变化情况。 👇 👇

图像经过旋转、缩放、平移后的效果如图9-7所示。调用 moment_invariants()子函数可以求得图像的7个不变矩,在子函数中为了减小动态范围,将计算得到的不变矩取对数。各图像的不变矩如上表所示,可见图像经过各种几何变换后所求得的不变矩具有较好的一致性。
代码如下:
import numpy as np
import cv2
from matplotlib import pyplot as plt
%matplotlib inline
%config InlineBackend.figure_format="retina"
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负号
def moment_invariants(img):
"""计算图像的Hu不变矩"""
# 确保图像是2D的灰度图像
if len(img.shape) == 3:
img = img[:, :, 0] # 取第一个通道
elif len(img.shape) > 2:
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 确保图像是8位单通道
if img.dtype != np.uint8:
img = img.astype(np.uint8)
# 计算空间矩、中心矩和归一化中心矩
moments = cv2.moments(img)
# 计算Hu不变矩
hu_moments = cv2.HuMoments(moments)
# 为了避免数值过小,通常取对数
hu_moments = -np.sign(hu_moments) * np.log10(np.abs(hu_moments) + 1e-10)
return hu_moments.flatten()
# 读取图像并确保是2D灰度图
img0 = cv2.imread(r'./img/lotus.jpg', 0)
if img0 is None:
# 如果找不到图像,创建测试图像
img0 = np.random.randint(0, 255, (300, 300), dtype=np.uint8)
print("使用随机生成的测试图像")
# 确保img0是2D数组
if len(img0.shape) == 3:
img0 = img0[:, :, 0]
elif len(img0.shape) > 2:
img0 = cv2.cvtColor(img0, cv2.COLOR_BGR2GRAY)
img = img0.copy()
textLists = [] # 用来存放几何变换名称
imgLists = [] # 用来存放几何变换图像
textLists.append("original")
imgLists.append(img.copy())
# 旋转45度
rotate_45_matrix = cv2.getRotationMatrix2D((img.shape[1] // 2, img.shape[0] // 2), -45, 1)
rotate_45_image = cv2.warpAffine(img, rotate_45_matrix, dsize=(img.shape[1], img.shape[0]))
textLists.append("rotate-45")
imgLists.append(rotate_45_image)
# 平移
img = img0.copy()
M = np.float32([[1, 0, 50], [0, 1, 50]])
translation_img = cv2.warpAffine(img, M, dsize=(img.shape[1], img.shape[0]))
textLists.append("translation")
imgLists.append(translation_img)
# 顺时针旋转90
img = img0.copy()
rotate_90_image = cv2.rotate(img, rotateCode=cv2.ROTATE_90_CLOCKWISE) # 修复拼写错误
textLists.append("rotate-90")
imgLists.append(rotate_90_image)
# 顺时针旋转180
img = img0.copy()
rotate_180_image = cv2.rotate(img, cv2.ROTATE_180) # 修复拼写错误
textLists.append("rotate-180")
imgLists.append(rotate_180_image)
# 缩小一半 - 修复维度问题
img = img0.copy()
half_height = img.shape[0] // 2
half_width = img.shape[1] // 2
resize_0_5_img = cv2.resize(img, (half_width, half_height)) # 直接调整大小,不需要创建零矩阵
textLists.append("shrink")
imgLists.append(resize_0_5_img)
# 逆时针旋转90
img = img0.copy()
rotate_270_image = cv2.rotate(img, rotateCode=cv2.ROTATE_90_COUNTERCLOCKWISE)
textLists.append("rotate-270")
imgLists.append(rotate_270_image)
# 计算所有图像的Hu矩
huMomentLists = []
for img in imgLists:
# 确保传递给moment_invariants的是2D图像
if len(img.shape) == 3:
img_2d = img[:, :, 0]
else:
img_2d = img
hu = moment_invariants(img_2d)
huMomentLists.append(np.array(hu))
# 打印Hu矩结果
for descipStr, hu in zip(textLists, huMomentLists):
descipStr += "\t"
for mm in hu:
descipStr += "%0.2f" % mm + '\t'
print(descipStr)
# 显示图像 - 修复显示的图像变量
plt.figure(figsize=(15, 8))
plt.subplot(241)
plt.imshow(img0, cmap="gray")
plt.title("原图像")
plt.axis("off")
plt.subplot(242)
plt.imshow(rotate_45_image, cmap="gray")
plt.title("旋转45度")
plt.axis("off")
plt.subplot(243)
plt.imshow(rotate_90_image, cmap="gray") # 使用正确的变量名
plt.title("顺时针旋转90")
plt.axis("off")
plt.subplot(244)
plt.imshow(rotate_180_image, cmap="gray") # 使用正确的变量名
plt.title("顺时针旋转180")
plt.axis("off")
plt.subplot(245)
plt.imshow(rotate_270_image, cmap="gray")
plt.title("逆时针旋转90")
plt.axis("off")
plt.subplot(246)
plt.imshow(resize_0_5_img, cmap="gray") # 直接使用resize_0_5_img,不需要额外的零矩阵
plt.title("缩小一半")
plt.axis("off")
plt.subplot(247)
plt.imshow(translation_img, cmap="gray")
plt.title("平移")
plt.axis("off")
plt.tight_layout()
plt.show()3. 图像分割
3.1 基本全局阈值法和Otsu阈值法
前言
1.基本全局阈值法
在图像分割任务中,若图像的目标(前景)和背景的灰度 差异明显 (例如文档中的黑白文字、显微镜下的细胞与背景),可以通过设定一个全局统一的阈值,将所有像素分为两类:
- 像素灰度值 ≥ 阈值 → 归为前景(或背景);
- 像素灰度值 < 阈值 → 归为背景(或前景)。
基本全局阈值法(Basic Global Thresholding) 是这类方法中最基础的算法,它通过迭代优化的方式,从图像整体出发自动确定一个“最佳” 的全局阈值,从而实现简单高效的分割。
核心逻辑
基本全局阈值法的核心逻辑是:先猜测一个初始阈值,用它分割图像并计算两类像素的平均灰度,再根据两类平均灰度更新阈值,不断迭代直到阈值稳定。最终得到的阈值能较好地区分前景和背景。
2.Otsu阈值法
基本全局阈值法的核心是:先猜一个初始阈值,然后通过迭代计算两类像素的平均灰度,不断调整阈值直到稳定。这种方法虽然简单,但依赖初始值,且对前景和背景灰度分布重叠严重 的图像(比如直方图没有明显双峰)效果可能不佳——因为迭代过程只是机械地平衡两类均值,未必能找到真正让两类区分最明显的阈值。
那么,有没有一种方法能直接自动找到最优阈值,而且更科学地衡量“两类区分是否明显”呢?
答案就是本节要介绍的 Otsu阈值法(大津法),也叫最大类间方差法,它是图像处理领域最经典、最常用的自动阈值分割算法之一,核心思想是 “让前景和背景的差异最大化”,而非简单平衡两类均值。
Otsu阈值法的核心逻辑
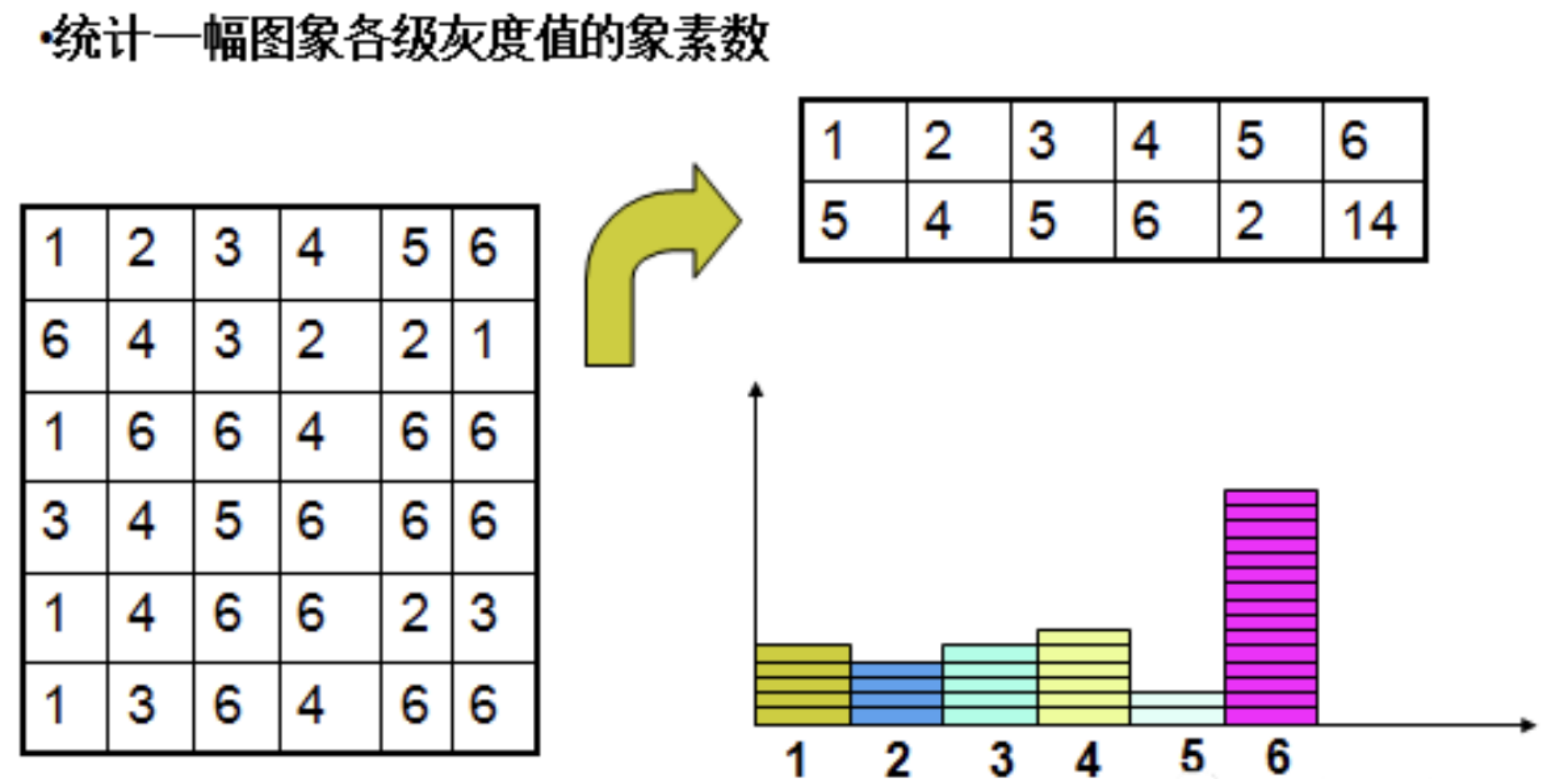
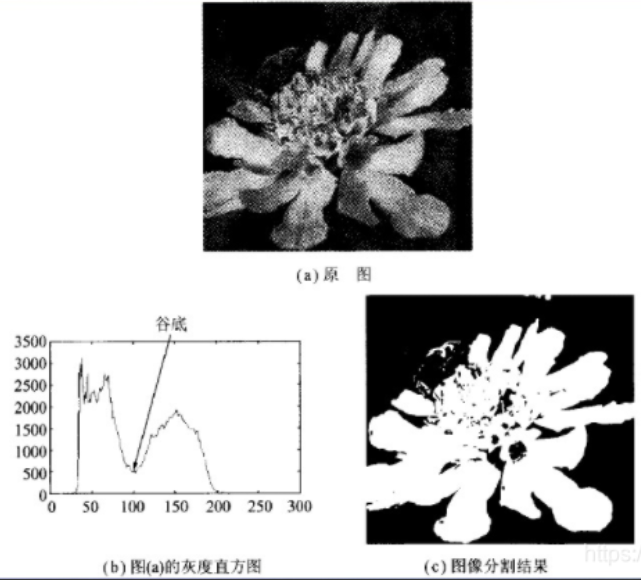
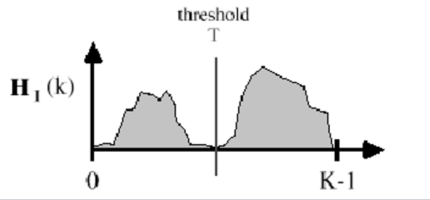
- 分析直方图:先统计图像中每个灰度级(0~255)出现的频率(比如灰度值50的像素有多少个,灰度值100的像素有多少个)。
- 遍历所有可能的阈值:从灰度值0到255,依次假设每个灰度值作为候选阈值(比如先试试T=50,再试T=51,直到T=255)。
- 对每个阈值,把像素分成两类:
- 一类是灰度值 ≤ 阈值的像素(通常是背景);
- 另一类是灰度值 > 阈值的像素(通常是前景)。
- 计算每组阈值下的“类间方差”:衡量这两类像素的灰度差异有多大。
- 选方差最大的阈值 :当某个阈值对应的类间方差达到最大值时,说明用这个阈值分割后,前景和背景的区分最明显,这就是我们要找的最佳阈值!👍
补充: 👇
- 以最佳阈值将图像的灰度直方图分割成两部分,使两类之间的方差取最大值,即分离性最大。此算法利用了最小二乘法原理。
- 编程的时候可以使用穷尽法,让阈值T从0到L-1,找到方差最大的T值,即为最佳阈值。
案例代码
import numpy as np
import cv2
from matplotlib import pyplot as plt
%matplotlib inline
%config InlinBackend.figure_format="retina"
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负
# 基本全局阈值法
def basic_global_thresholding(Img,T0=0.1): #输入的图像要求为灰度图像
'''
:param Img: 需进行全阈值分割的图像
:param T0: 迭代终止容差,当相临迭代得到的阈值差小于此值,则终止迭代
:return: 全阈值
'''
G1 = np.zeros(Img.shape, np.uint8) # 定义矩阵分别用来装被阈值T1分开的两部分
G2 = np.zeros(Img.shape, np.uint8)
T1 = np.mean(Img)
diff=255
while(diff>T0):
_,G1=cv2.threshold(Img,T1,255,cv2.THRESH_TOZERO_INV) #THRESH_TOZERO 超过thresh的像素不变, 其他设为0
_,G2=cv2.threshold(Img,T1,255,cv2.THRESH_TOZERO)
garray1 = np.array(G1)
garray2 = np.array(G2)
loc1 = np.where(garray1>0.001) #可以对二维数组操作
loc2 = np.where(garray2 > 0.001)
# g1 = list(filter(lambda a: a > 0, G1.flatten()))#只能对一维列表筛选,得到的是一个筛选对象
# g2 = list(filter(lambda a: a > 0, G2.flatten()))
ave1=np.mean(garray1[loc1])
ave2=np.mean(garray2[loc2])
T2=(ave1+ave2)/2.0
diff=abs(T2 - T1)
T1=T2
return T2
# 直方图
def histogram(image):
(row, col) = image.shape
#创建长度为256的list
hist = [0]*256
for i in range(row):
for j in range(col):
hist[image[i,j]] += 1
return hist
# 案例1
img = cv2.imread(r'./img/paopao.jpg',0)
#案例2 将上面的注释 试试这个 叠加噪声和不均光照试试
# img22 = cv2.imread(r'./img/ch08-4(a).jpg',0) # 读取图像,0表示读取为灰度图像
# # 添加不均匀光照
# img_uneven222 = addNonUniformIllumination(img22.copy())
# # 添加高斯噪声
# img = addGaussianNoise(img_uneven222, 0, 0.05)
# #平滑一下
# img=cv2.blur(img,(3,3))
# 案例3 将上面的注释,试试这个
# img = cv2.imread(r'./img/ch11-01.png',0) # 读取图像,0表示读取为灰度图像
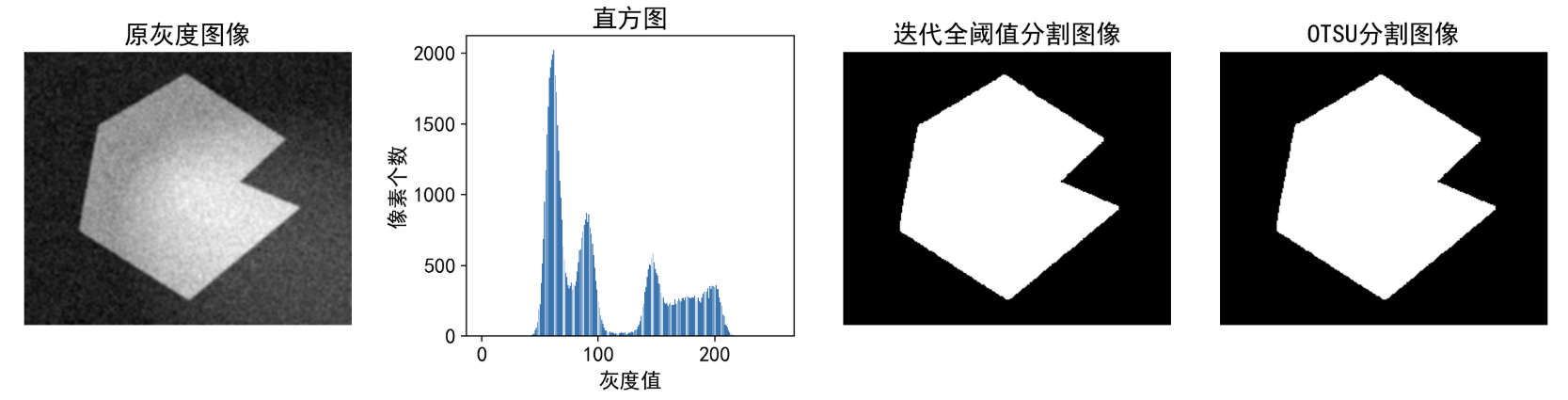
T2=basic_global_thresholding(img,T0=0.1) # 调用全局阈值分割函数,T0为迭代终止容差,当相临迭代得到的阈值差小于此值,则终止迭代
_,img_result=cv2.threshold(img,T2,255,cv2.THRESH_BINARY) # ,_为阈值,img_result为分割结果,255为最大值,THRESH_BINARY为二值化
_,img_otsu=cv2.threshold(img,128,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU) # Otsu阈值分割,128为初始阈值,255为最大值,THRESH_OTSU为Otsu阈值分割
plt.figure(figsize=(15,5))
plt.rcParams.update({"font.size":14})
plt.axes([0.0, 0.1, 0.2, 0.8])
plt.title("原灰度图像")
plt.axis("off")
plt.imshow(img,cmap="gray")
plt.axes([0.27, 0.23, 0.2, 0.55])
plt.title("直方图")
h1=histogram(img)
plt.bar(range(256),h1)
plt.xlabel("灰度值")
plt.ylabel("像素个数")
plt.axes([0.5, 0.1, 0.2, 0.8])
plt.title("迭代全阈值分割图像")
plt.axis("off")
plt.imshow(img_result,cmap="gray")
plt.axes([0.73, 0.1, 0.2, 0.8])
plt.title("OTSU分割图像")
plt.axis("off")
plt.imshow(img_otsu,cmap="gray")
plt.show()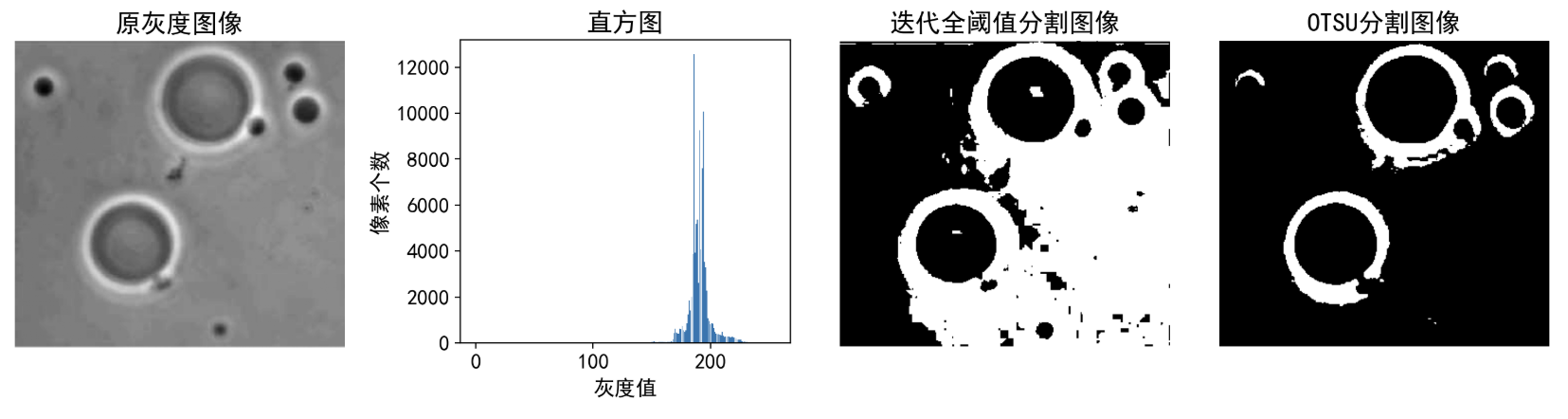
3.2 移动平均阈值法
前言
1.背景和定义
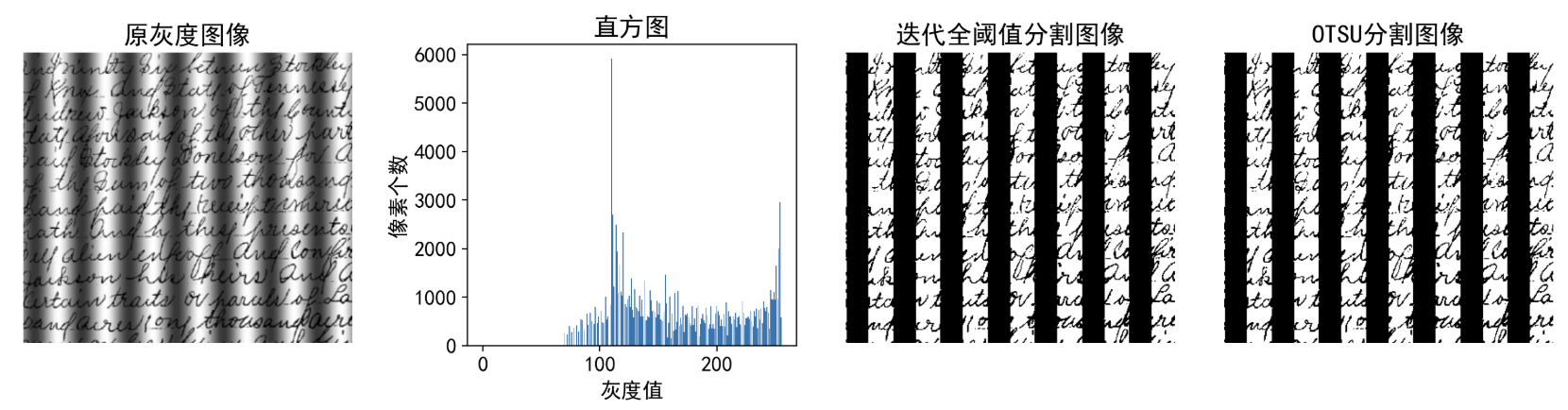
前面2种方法都是全局阈值法,它们的阈值是通过迭代计算得到的,但它们的计算过程是基于全局的,无法处理局部变化。
但在实际应用中,许多图像并不满足这些理想条件”,比如:👇
- 拍摄的文档可能存在光照不均(一侧亮、一侧暗)
- 工业检测中的零件可能因表面反光导致局部灰度突变
- 医学图像中器官与周围组织的灰度差异可能随区域变化。
这时,若用全局统一的阈值分割,会出现“某些区域分割准确,另一些区域却完全错误 ”的问题(例如:亮区文字被误判为背景,暗区背景被误判为目标)。
那么,有没有一种方法能根据图像不同区域的灰度特点,动态调整局部阈值,从而适应复杂光照或灰度变化的场景呢?
答案就是本节要介绍的 移动平均阈值法(Moving Average Thresholding) ,它是一种局部自适应阈值分割技术,核心思想是:通过滑动窗口计算局部区域的平均灰度,动态生成该区域的阈值,实现“哪里亮哪里调高阈值,哪里暗哪里调低阈值”的智能分割。
2.移动平均阈值法的核心逻辑 👇
- 划分局部区域 :把整张图片分成许多小的“窗口”(可以是固定大小的方块,比如15×15像素,也可以是滑动的窗口),每个窗口覆盖图像的一小部分。
- 计算局部平均灰度 :对每个小窗口内的所有像素,计算它们的灰度平均值(即该区域的“整体明暗程度”)。
- 动态生成局部阈值 :根据局部平均灰度,调整该窗口的阈值(例如:窗口较亮时,阈值适当提高,避免把亮背景误判为目标;窗口较暗时,阈值适当降低,避免把暗目标误判为背景)。
- 常见的调整方式 :直接用局部平均灰度作为阈值,或在其基础上加减一个固定偏移量(如阈值 = 局部平均灰度 ± 常数)。
- 逐区域分割 :对每个小窗口内的像素,用该窗口对应的局部阈值进行二值化(例如:像素灰度 ≥ 局部阈值 → 前景;像素灰度 < 局部阈值 → 背景)。
- 合并结果 : 将所有小窗口的分割结果拼接起来,形成整张图片的最终二值图像。
举个例子帮助理解
假设有一张扫描的文档图片,左侧因光源直射较亮(文字灰度约180200),右侧因阴影较暗(文字灰度约100120),背景左侧灰度约220240,右侧灰度约80100。
移动平均阈值法:将图片分成多个15×15的小窗口后,右侧亮区的窗口平均灰度约210,动态阈值可能设为200(文字180200仍高于阈值,被分为前景);左侧暗区的窗口平均灰度约90,动态阈值可能设为80(文字100120高于阈值,被分为前景)。最终,左右两侧的文字都能被准确分割,而背景被正确排除。

👇 👇
在OpenCV中,移动平均阈值法和自适应阈值法核心思想相似(都是局部自适应分割),但OpenCV官方库中没有直接提供“移动平均阈值法”的现成函数,而提供了专门的 cv2.adaptiveThreshold()函数来实现自适应阈值法。因此,两者的主要区别体现在:一个是需要手动实现(或自行封装逻辑),另一个是OpenCV原生支持。
import numpy as np
import cv2
from matplotlib import pyplot as plt
%matplotlib inline
%config InlinBackend.figure_format="retina"
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负
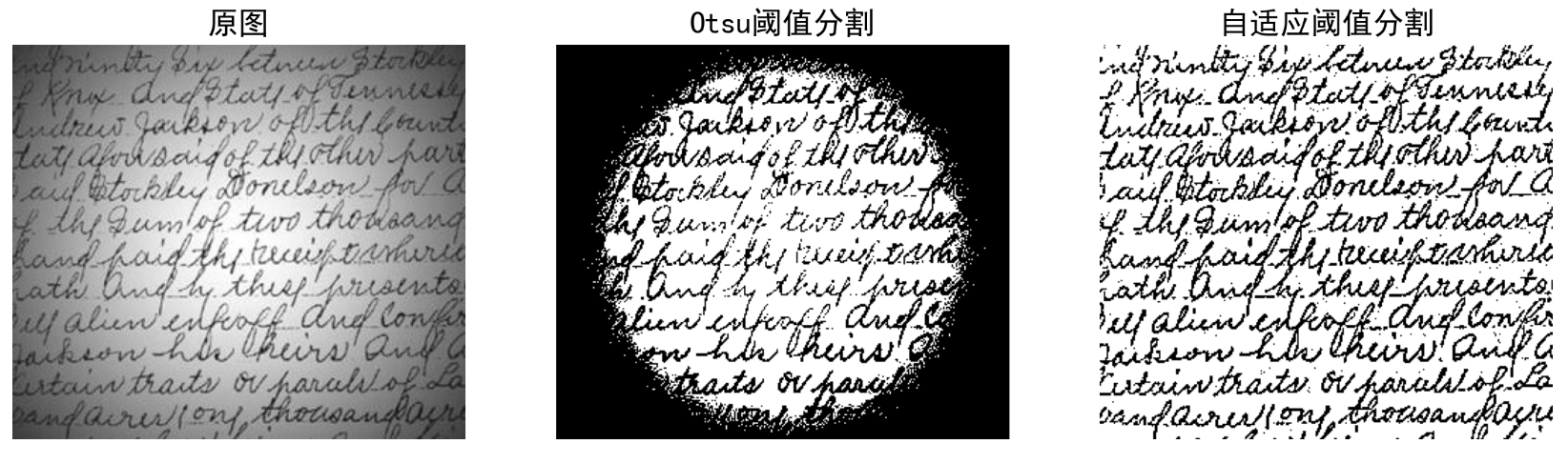
img0 = cv2.imread(r'./img/light_circle.jpg',0)
# 案例2 将上面的注释,试试这个
img0 = cv2.imread(r'./img/ch11-01.png',0)
# 案例3 将上面的注释,试试这个
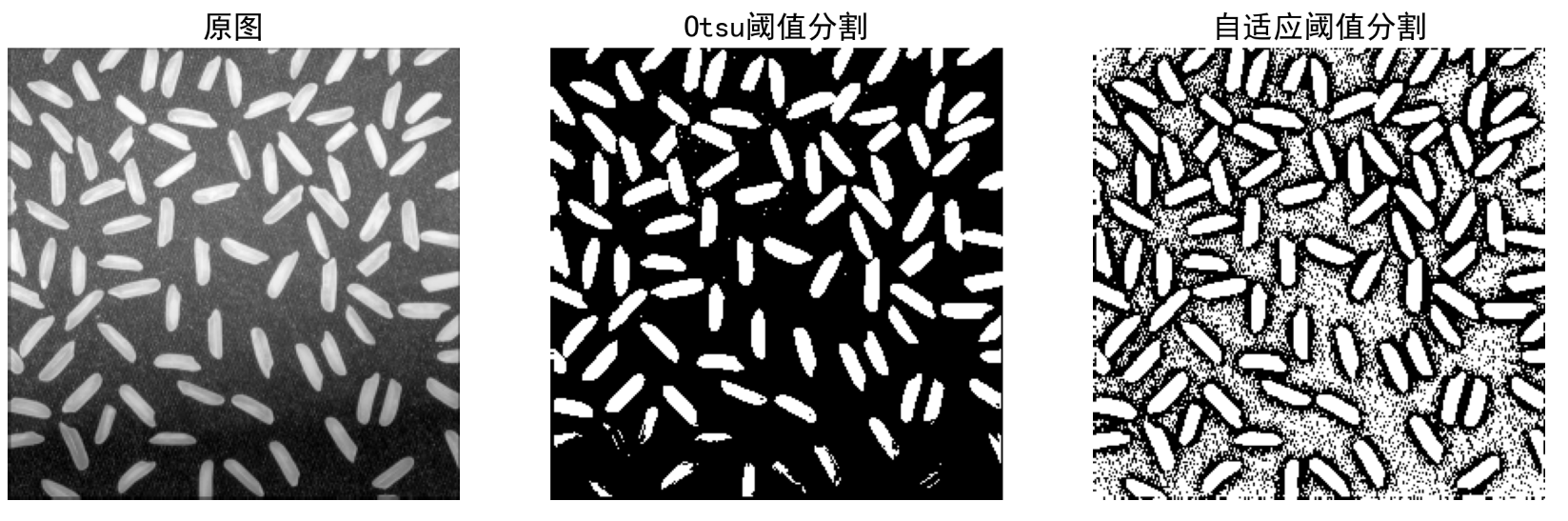
# img0 = cv2.imread(r'./img/Fig0926(a)(rice).tif',0)
_,img_seg=cv2.threshold(img0,128,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
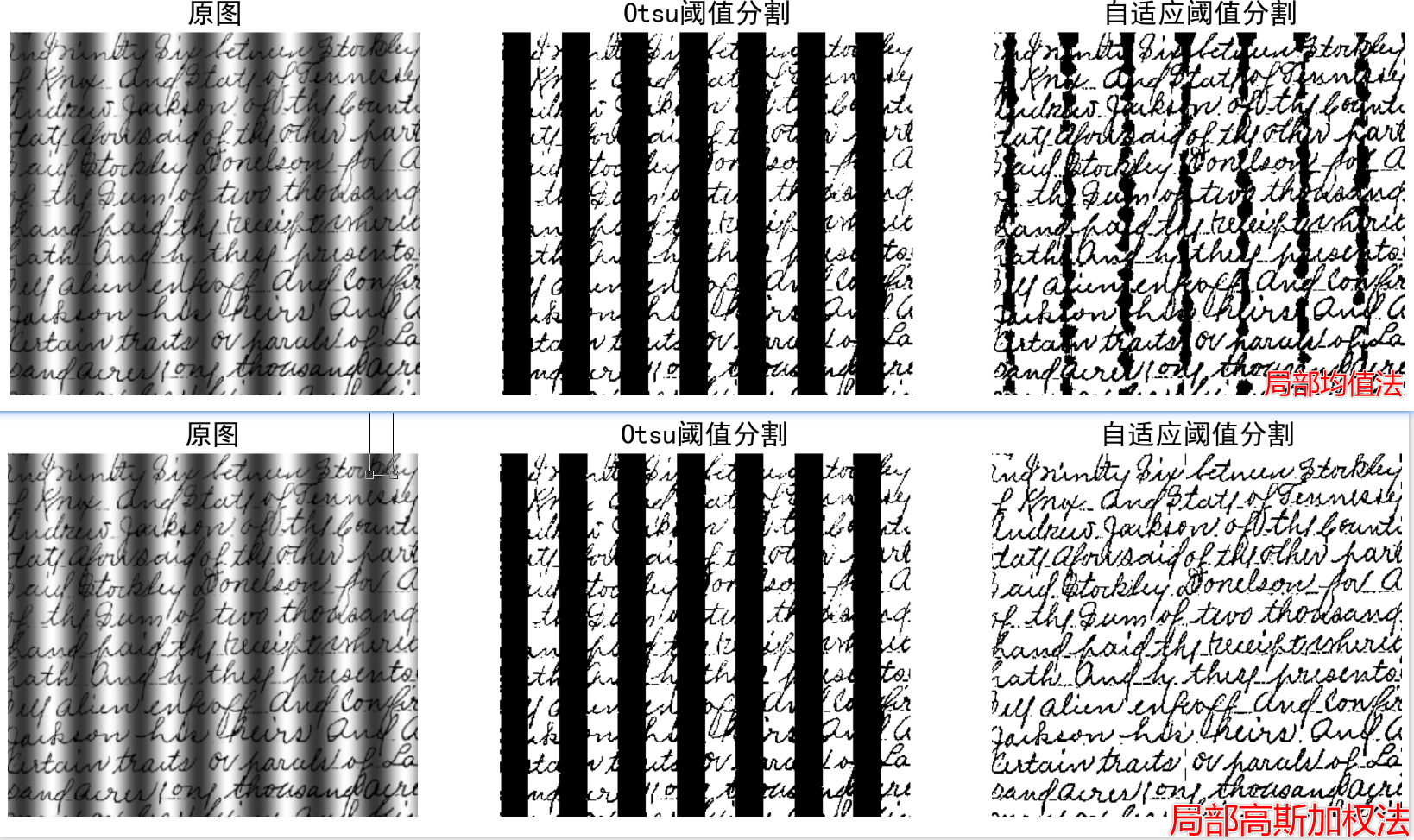
# 自适应阈值分割 ADAPTIVE_THRESH_MEAN_C 为局部均值法,ADAPTIVE_THRESH_GAUSSIAN_C为局部高斯加权法,THRESH_BINARY为二值化,kernalSize为窗口大小,6为偏移量
kernalSize=19
img_seg_adapt = cv2.adaptiveThreshold(img0, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, kernalSize, 6)
# 自适应阈值分割 ADAPTIVE_THRESH_MEAN_C 为局部均值法,ADAPTIVE_THRESH_GAUSSIAN_C为局部高斯加权法,THRESH_BINARY为二值化,kernalSize为窗口大小,6为偏移量
plt.figure(figsize=(15,5))
plt.subplot(131)
plt.imshow(img0,cmap="gray")
plt.axis("off")
plt.title("原图")
plt.subplot(132)
plt.imshow(img_seg,cmap="gray")
plt.axis("off")
plt.title("Otsu阈值分割")
plt.subplot(133)
plt.imshow(img_seg_adapt,cmap="gray")
plt.axis("off")
plt.title("自适应阈值分割")
plt.show()