边缘检测、模板匹配和霍夫变换
边缘检测
1. 边缘检测的基本概念
前言
1. 什么是边缘检测?
边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的⽬的是标识数字图像中亮度变化明显的点。图像属性中的显著变化通常反映了属性的重要事件和变化。边缘的表现形式如下图所示:
图像边缘检测大幅减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。
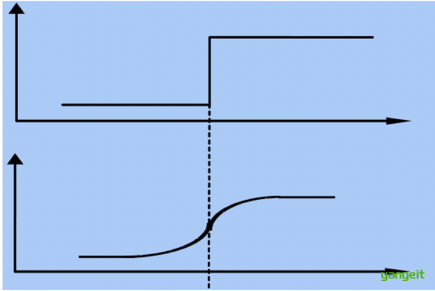
想象一下一幅从左到右亮度逐渐增加的图像,它的灰度变化曲线是平缓的斜坡。而在一个物体的边缘处,灰度会有一个突然的跳变,曲线会变得很陡峭。
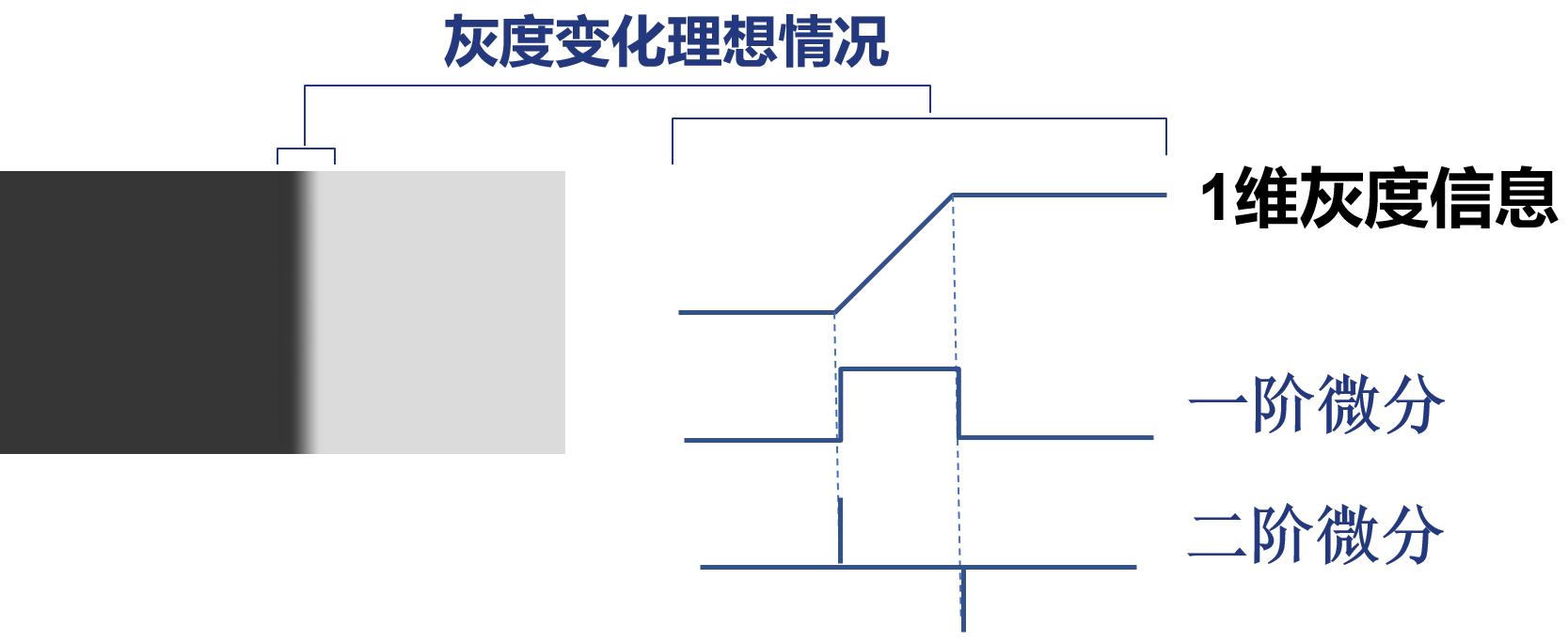
一阶微分:衡量的是变化的速度。在平缓区域,一阶微分值接近0;在陡峭的边缘,一阶微分值会很大。所以,一阶微分会产生一个很宽的“边缘”。
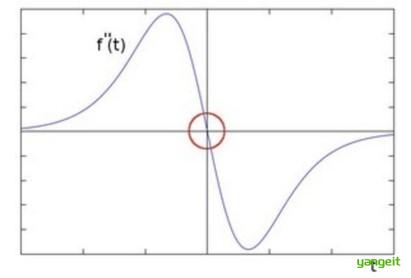
二阶微分:衡量的是变化速度的变化率,也就是曲线的斜率变化。在平缓区域,二阶微分值为0; 在灰度跳变的边缘起点(从平缓变陡峭),二阶微分会产生一个正脉冲 ;在边缘的终点(从陡峭变平缓),会产生一个负脉冲 。这意味着,二阶微分会产生一个双边缘,并且能够突出灰度变化的方向。
有许多方法用于边缘检测,它们的绝大部分可以划分为两类:基于搜索和基于零穿越。
基于搜索:通过寻找图像一阶导数中的最大值来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并利用此方向找到局部梯度模的最大值。代表算法:Sobel算子。
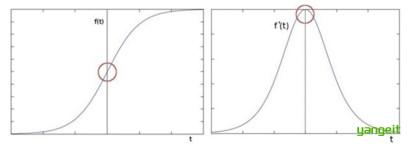
基于零穿越 :通过寻找图像二阶导数零穿越来寻找边界。代表算法:Laplacian拉普拉斯算子。
2. 边缘检测的常用算子
前言
三大边缘检测算子核心区别对比表
| 对比维度 | Sobel算子 | Laplacian算子 | Canny算子 |
|---|---|---|---|
| 数学本质 | 一阶微分算子 (梯度计算:) | 二阶微分算子 (二阶导数:) | 多阶段复合算子 (高斯滤波+一阶微分+非极大值抑制+双阈值) |
| 核心原理 | 计算像素邻域的亮度变化率(梯度幅值) | 检测像素邻域的亮度曲率变化(二阶导数过零点) | 先降噪、再找边缘、最后细化+去伪,全流程优化边缘质量 |
| 边缘特点 | 边缘较粗(1-2像素)、连续但不够精细 | 边缘极细(单像素)、定位精准,但易有双边响应 | 边缘最细(单像素)、连续光滑、几乎无杂点 |
| 抗噪性 | ⭐⭐⭐☆☆ 较好(核内加权平均抑制噪声) | ⭐☆☆☆☆ 差(二阶微分放大高频噪声) | ⭐⭐⭐⭐⭐ 优秀(高斯滤波预处理+双阈值过滤伪边缘) |
| 计算复杂度 | 中等(需两次卷积:X+Y方向) | 低(一次卷积) | 高(多步骤复合,但OpenCV已高度优化) |
| 参数依赖性 | 低(仅需选择核大小,通常固定3×3) | 低(仅需选择核类型,4邻域/8邻域) | 高(需手动调双阈值threshold1/threshold2,影响边缘完整性) |
| 典型应用场景 | 实时视频处理、工业检测、特征提取(需方向信息时) | 图像锐化、噪声少的精细结构检测(如扫描文档) | 自动驾驶、医学影像、高精度测量(对边缘质量要求严苛的场景) |
| 一句话总结 | 稳健的“粗边缘检测器”,适合对稳定性要求高的任务 | 敏感的“细节放大镜”,适合无噪声环境的精细检测 | 全能的“工业级边缘引擎”,综合性能碾压前两者 |
案例:👇
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei', 'Microsoft YaHei']
plt.rcParams['axes.unicode_minus'] = False
# ---------------------- 1. 创建简单测试图 ----------------------
# 生成200x200的黑色图
img = np.zeros((200, 200), dtype=np.uint8)
# 画一个白色圆形(圆心(100,100),半径40)
cv2.circle(img, (100, 100), 40, 255, -1) # -1表示填充
# ---------------------- 2. 三种边缘检测(超简单) ----------------------
# 方法1:Sobel边缘(简单组合)
sobel_x = cv2.Sobel(img, cv2.CV_8U, 1, 0, ksize=3)
sobel_y = cv2.Sobel(img, cv2.CV_8U, 0, 1, ksize=3)
sobel_edge = cv2.magnitude(sobel_x.astype(float), sobel_y.astype(float))
sobel_edge = np.uint8(sobel_edge) # 转成图像格式
# 方法2:Laplacian边缘(简单调用)
laplacian_edge = cv2.Laplacian(img, cv2.CV_8U)
laplacian_edge = cv2.convertScaleAbs(laplacian_edge) # 取绝对值
# 方法3:Canny边缘(一行代码!)
canny_edge = cv2.Canny(img, 50, 150) # 低阈值50,高阈值150
# ---------------------- 3. 简单对比显示 ----------------------
plt.figure(figsize=(12, 4))
plt.subplot(1, 4, 1)
plt.imshow(img, cmap='gray')
plt.title("原图(白色圆形)")
plt.axis('off')
plt.subplot(1, 4, 2)
plt.imshow(sobel_edge, cmap='gray')
plt.title("Sobel边缘\n(较粗、有杂点)")
plt.axis('off')
plt.subplot(1, 4, 3)
plt.imshow(laplacian_edge, cmap='gray')
plt.title("Laplacian边缘\n(细但有很多杂点)")
plt.axis('off')
plt.subplot(1, 4, 4)
plt.imshow(canny_edge, cmap='gray')
plt.title("Canny边缘\n(细、干净、连续)")
plt.axis('off')
plt.tight_layout()
plt.suptitle("三行代码实现Canny边缘检测(对比Sobel/Laplacian)", fontsize=14, fontweight='bold')
plt.subplots_adjust(top=0.85)
plt.show()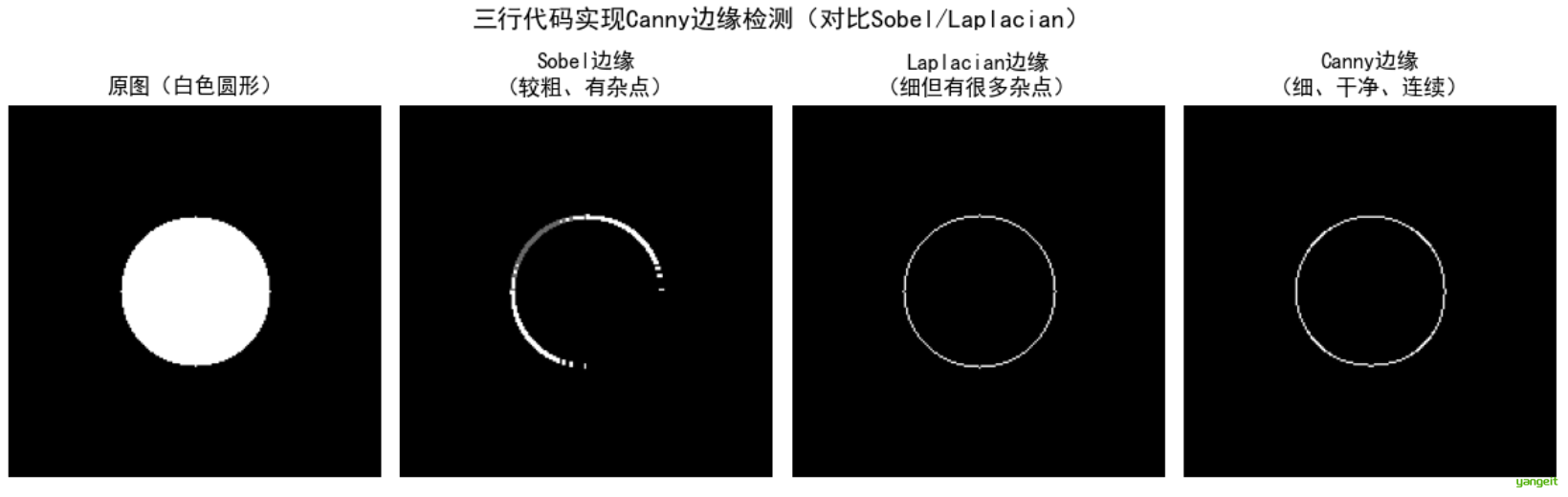
表格关键结论速记
- 选Sobel:要稳定、怕噪声、求实时 → “宁可边缘粗一点,不能错检漏检”。
- 选Laplacian:图像干净、要极致细节 → “细节控专属,但得小心噪声捣乱”。
- 选Canny:要质量、抗干扰、做专业应用 → “预算够(算力/调参)就上Canny,效果不会失望”。
Canny案例 👇
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei', 'Microsoft YaHei']
plt.rcParams['axes.unicode_minus'] = False
# ---------------------- 1. 读取图片并预处理 ----------------------
# 读取图片(替换为你的cat.png路径)
img = cv2.imread('./img/dog.png',0)
# ---------------------- 2. Canny边缘检测(核心一步) ----------------------
# 自动高斯模糊+Canny检测(阈值可根据图片调整)
edges = cv2.Canny(img, threshold1=50, threshold2=150) # 低阈值50,高阈值150
# ---------------------- 3. 显示对比结果 ----------------------
plt.figure(figsize=(15, 5))
# 灰度图
plt.subplot(1, 3, 2)
plt.imshow(img, cmap='gray')
plt.title("灰度图(预处理)")
plt.axis('off')
# Canny边缘结果
plt.subplot(1, 3, 3)
plt.imshow(edges, cmap='gray')
plt.title("Canny边缘检测结果")
plt.axis('off')
plt.tight_layout()
plt.suptitle("Canny算子检测猫咪边缘示例", fontsize=16, fontweight='bold')
plt.subplots_adjust(top=0.85)
plt.show()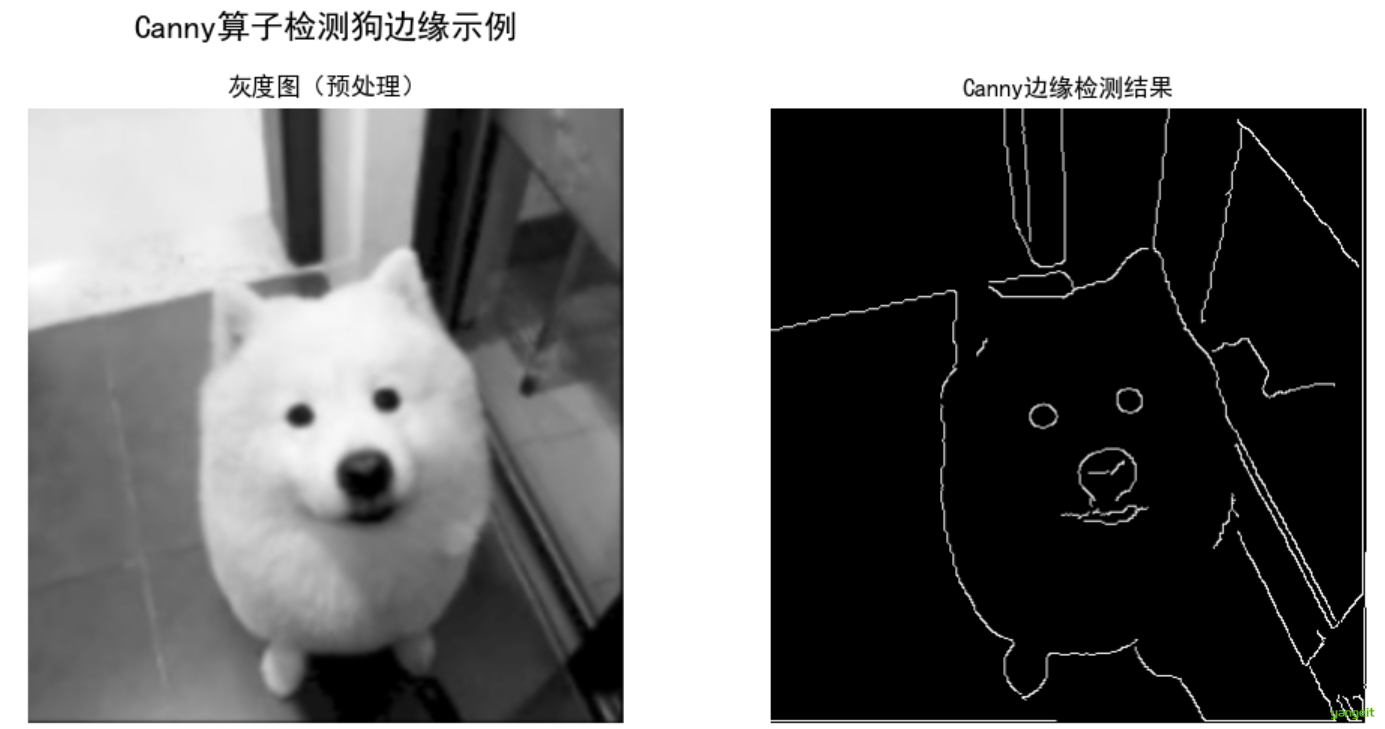
2. 模版匹配和霍夫变换
掌握模板匹配的原理并完成应用
理解霍夫线变换的原理及霍夫圆检测的基本逻辑
熟悉OpenCV中线与圆检测的具体操作方法
2.1 模版匹配
模版匹配
1.原理
模板匹配是指在给定图片中查找与模板最相似区域的技术,其输入包括模板和待匹配的原图像,核心思路是按滑窗方式移动模板图片,计算模板与图像对应区域的匹配度,最终选取匹配度最高的区域作为结果。
实现流程需准备两幅图像:
原图像(I):需在其中定位与模板匹配的目标区域;
模板(T):用于与原图像比对的图像块。
滑动模板图像和原图像进行比对:

以固定大小的模板为“窗口”,在原图像上逐位置滑动,依次计算模板与对应窗口区域的相似度,最终筛选出相似度最高的位置作为匹配结果。
2. 实现
OpenCV提供了模板匹配的函数matchTemplate(),其原型如下:
dst = cv2.matchTemplate(image, templ, method, mask=None)参数说明:
- image:待匹配的原图像;
- templ:模板图像;
- method:匹配算法;主要有:平方差匹配(cv2.TM_SQDIFF)、相关匹配(cv2.TM_CCORR)、相关系数匹配(cv2.TM_CCORR_NORMED)
- 平方差匹配:利用模板与图像之间的平方差进⾏匹配,最好的匹配是0,匹配越差,匹配的值越⼤。
- 相关匹配:利用模板与图像之间的乘积进⾏匹配,最好的匹配是1,匹配越差,匹配的值越⼩,
- 相关系数匹配:利用模板与图像之间的相关系数进⾏匹配,最好的匹配是1,匹配越差,匹配的值越⼩,-1表示完全不相关。
- mask:掩码图像,可选参数。
完成匹配后,使用cv.minMaxLoc()方法查找极值位置即可。若使用平方差作为比较方法,则最小值位置是最佳匹配位置;其他方法则取最大值位置为最佳匹配位置。
案例如下:
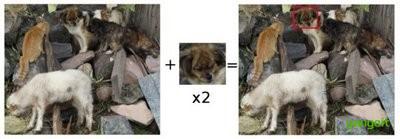
在该案例中,载⼊要搜索的图像和模板,图像如下所示:

模板如下所示:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1. 图像和模板读取(确保路径下存在目标文件)
img = cv.imread('./img/wlwz.jpg') # 原图像(BGR格式)
template = cv.imread('./img/wlwz_1.jpg') # 模板图像(需与原图像通道数一致)
if img is None or template is None:
raise FileNotFoundError("无法加载图像/模板文件,请检查路径")
# 获取模板的高、宽(模板shape为[高, 宽, 通道],故h=shape[0], w=shape[1])
h, w = template.shape[:2]
# 2. 模板匹配
# 2.1 执行模板匹配(使用归一化相关系数匹配,结果更稳定)
res = cv.matchTemplate(img, template, cv.TM_CCOEFF_NORMED) # 建议用归一化方法减少亮度影响
# 2.2 查找最佳匹配位置并绘制矩形
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(res)
# 注:当前使用的TM_CCOEFF_NORMED是相关系数匹配,最佳位置为最大值(若用TM_SQDIFF则取最小值)
top_left = max_loc
# 计算匹配区域的右下角坐标(模板宽w、高h)
bottom_right = (top_left[0] + w, top_left[1] + h)
# 在原图像上绘制绿色矩形标记匹配区域(BGR格式中(0,255,0)为绿色,线宽2)
cv.rectangle(img, top_left, bottom_right, (0, 255, 0), 2)
# 3. 图像显示(Matplotlib需BGR→RGB转换,关闭坐标轴)
plt.imshow(img[:, :, ::-1]) # ::-1实现BGR到RGB的反转
plt.title('匹配结果')
plt.xticks([]), plt.yticks([]) # 隐藏坐标轴刻度
plt.show()找到了目标区域,效果如下:

2.2 霍夫变换
霍夫变换
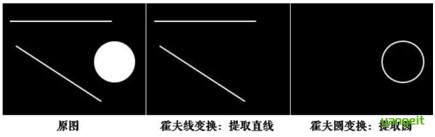
霍夫变换常⽤来提取图像中的直线和圆等⼏何形状,如下图所示:
比如,检测直线的原理如下:👇
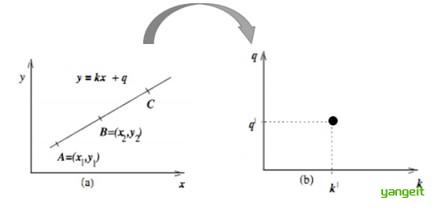
笛卡尔坐标系中的⼀条直线,对应于霍夫空间中的⼀个点。反过来,同样成⽴,霍夫空间中的⼀条线,对应于笛卡尔坐标系中
⼀个点,如下所示:

霍夫线检测的整个流程如下图所示:
2. 霍夫线检测
在OpenCV中做霍夫线检测是使⽤的API是:
lines = cv.HoughLines(image, rho, theta, threshold)
参数说明:
- image:输入图像,必须是8位的单通道二值图像,通常由Canny边缘检测算法得到;
- rho:以像素为单位的距离精度,通常取1;
- theta:以弧度为单位的角度精度,通常取1度(π/180);
- threshold:累加器阈值参数,只有⽤于霍夫空间的交点累加值⽐这个阈值⼤的线才被检测出来,通常取阈值默认值100即可。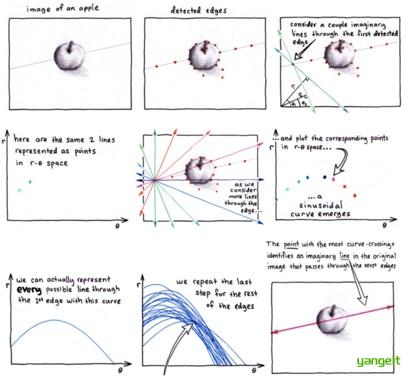
案例1:直线检测:
检测下面的直线图像:
import numpy as np
import random
import cv2 as cv
import matplotlib.pyplot as plt
# 1. 加载图片并预处理为二值边缘图
img = cv.imread('./img/rili.png')
if img is None:
raise FileNotFoundError("无法加载图像文件,请检查路径")
# 转为灰度图 → Canny边缘检测
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray, 50, 150) # Canny阈值:低阈值50,高阈值150(需根据实际图像调整)
# 2. 霍夫直线变换
# 参数说明:edges-边缘图;0.8-距离分辨率(ρ);np.pi/180-角度分辨率(θ,1度);150-累加器阈值(投票数>150才视为直线)
lines = cv.HoughLines(edges, 0.8, np.pi/180, 150)
# 3. 将检测到的直线绘制在原图上(极坐标转直角坐标)
if lines is not None: # 避免无直线时出错
for line in lines:
rho, theta = line[0] # 霍夫直线参数:rho=极径,theta=极角(极坐标表示)
# 极坐标转直角坐标:直线一般式ax + by = rho
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho # 直线上任意一点(x0,y0)
y0 = b * rho
# 延长直线(取1000长度的线段,避免线段过短看不清)
# 方向向量(-b,a)与(b,-a)垂直直线方向,用于生成线段两端点
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
# 绘制绿色直线(BGR格式中(0,255,0)为绿色)
cv.line(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 4. 图像显示(BGR→RGB转换,调整画布大小)
plt.figure(figsize=(10, 8), dpi=100) # 修正"1θ"→"10"
plt.imshow(img[:, :, ::-1]), plt.title('霍夫变换线检测')
plt.xticks([]), plt.yticks([]) # 隐藏坐标轴
plt.show()
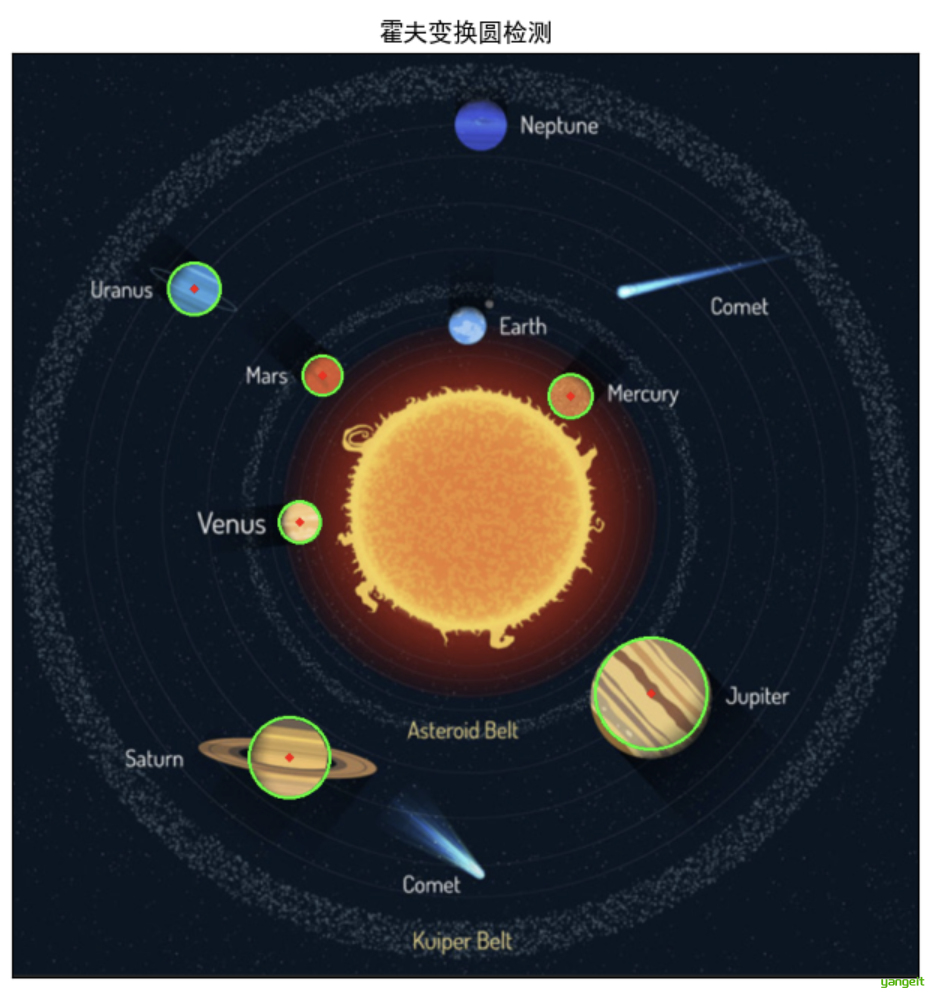
案例2:检测圆形,opencv中霍夫圆检测的API是:
circles = cv.HoughCircles(image, method, dp, minDist)
参数说明:
- image:输入图像,必须是8位的灰度图像;
- method:圆检测的方法,OpenCV中只实现了霍夫梯度法(CV_HOUGH_GRADIENT);
- dp:累加器分辨率与图像分辨率的比值,通常取1,表示与图像的分辨率相同;
- minDist:两个圆之间的最小距离;import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
# 1. 读取图像并转换为灰度图(修正颜色转换码:BGRA→BGR)
planets = cv.imread("./img/star1.png")
if planets is None:
raise FileNotFoundError("无法加载图像文件,请检查路径")
# 注:若原图像为4通道(BGRA),用COLOR_BGRA2GRAY;若为3通道(BGR),用COLOR_BGR2GRAY
# 此处假设原图像为3通道,修正为COLOR_BGR2GRAY(若为4通道需改回COLOR_BGRA2GRAY)
gray_img = cv.cvtColor(planets, cv.COLOR_BGR2GRAY) # 修正"gay_img"→"gray_img"(拼写错误)
# 2. 中值模糊去噪(修正"2θθ"→"200":中值滤波核大小需为正奇数,7是合理的)
img_blur = cv.medianBlur(gray_img, 7) # 核大小7×7,有效去除椒盐噪声
# 3. 霍夫圆检测
# 参数说明:
# - cv.HOUGH_GRADIENT:梯度法(最常用);
# - 1:累加器分辨率与原图的比例(1表示相同);
# - 100:两个圆之间的最小距离(避免重复检测相邻圆);
# - param1:Canny边缘检测的高阈值(低阈值为其一半,即50);
# - param2:累加器阈值(越小检测越多圆,需根据图像调整)
circles = cv.HoughCircles(
img_blur,
cv.HOUGH_GRADIENT,
1,
100,
param1=80,
param2=55,
minRadius=0, # 最小圆半径(可选,默认0)
maxRadius=0 # 最大圆半径(可选,默认0表示无限制)
)
# 4. 将检测结果绘制在图像上(需先判断是否有检测到圆)
if circles is not None:
# 转换为整数坐标(霍夫圆检测返回浮点数,需取整)
circles = np.uint16(np.around(circles))
for i in circles[0, :]: # 遍历每个圆的参数(circles shape为[1, N, 3],N为圆的数量)
center_x, center_y, radius = i[0], i[1], i[2] # i[0]=圆心x,i[1]=圆心y,i[2]=半径
# 绘制圆形轮廓(绿色,线宽2)
cv.circle(planets, (center_x, center_y), radius, (0, 255, 0), 2)
# 绘制圆心(红色,半径2,线宽3)
cv.circle(planets, (center_x, center_y), 2, (0, 0, 255), 3)
# 5. 图像显示(修正"1θ"→"10"、"::–1"→"::-1")
plt.figure(figsize=(10, 8), dpi=100) # 设置画布大小(宽10英寸,高8英寸)
plt.imshow(planets[:, :, ::-1]), plt.title('霍夫变换圆检测') # BGR→RGB转换
plt.xticks([]), plt.yticks([]) # 隐藏坐标轴
plt.show()