
第九章 图像描述和特征提取
1. 灰度图像的描述
前言
众所周知,计算机不认识图像,只认识数字,为了使计算机能够识别图像,就需要将图像转换为数字,这个过程称为图像处理。
在前序章节中,我们系统学习了图像的基础处理技术(如滤波、增强、边缘检测等),这些操作的核心目标是改善图像质量或突出特定信息。但若要让计算机真正“理解”图像内容(例如判断图中是猫还是狗、识别工业零件是否缺陷),仅靠处理后的图像本身是不够的——我们需要从图像中提取能反映其本质属性的“特征”,并通过结构化的描述将这些特征转化为可计算、可比较的信息单元。

本章聚焦图像描述与特征提取,这是连接“图像处理”与“图像分析/理解”的关键桥梁。其中,灰度图像作为最基础的图像类型(单通道,仅包含亮度信息),其描述方法是后续彩色图像、纹理图像等复杂场景特征提取的基石。我们将首先从灰度图像的全局特性出发,学习三类典型的描述特征:幅度特征、变换系数特征和直方图特征。
灰度图像的描述旨在通过数学量或统计量,刻画图像整体的亮度分布、对比度、能量聚集等宏观特性。这些特征不依赖像素级细节(如边缘位置),而是从整体层面反映图像的“宏观印象”,常用于图像分类、质量评估、检索等任务的前期分析。
1.幅度特征:图像亮度的直观量化
核心思想:直接基于图像像素的灰度值(即亮度幅度)计算全局统计量,反映图像的整体明暗程度与变化范围。
典型指标:
- 平均灰度(均值):所有像素灰度值的算术平均,描述图像的整体亮度水平。公式为:
其中M×N为图像尺寸,f(i,j)为坐标(i,j)处的灰度值。
应用场景:低均值可能对应暗背景图像(如夜景),高均值可能对应明亮场景(如雪地)。

灰度方差/标准差:衡量像素灰度值相对于均值的离散程度,反映图像的对比度(明暗差异大小)
特点:方差越大,说明图像中同时存在较亮和较暗的像素(对比度高,如强光下的物体轮廓);方差越小,图像整体偏灰(对比度低,如雾天场景)。
最大/最小灰度值:直接给出图像中最亮和最暗的像素亮度,可用于检测极端亮度区域(如过曝或欠曝部分)。
2.变换系数特征:
核心思想:通过傅里叶变换、小波变换等频域转换方法,将图像从空间域(像素矩阵)转换到频域(不同频率成分的叠加),提取各频率分量的系数特征,反映图像的“全局结构模式”。
典型方法与特征:
- 傅里叶变换系数:将图像转换到频域后,得到复数形式的频谱(包含幅度谱和相位谱)。其中:
- 低频系数(靠近频谱中心):对应图像中缓慢变化的成分(如大面积均匀区域、整体背景亮度)。
- 高频系数(远离频谱中心):对应图像中快速变化的成分(如边缘、噪声、细节纹理)。
常用特征:低频系数的总能量(反映图像主体结构的稳定性)、高频系数的能量占比(反映细节丰富程度)。例如,医学X光片中,若高频能量占比高,可能意味着骨骼边缘清晰;若低频能量主导,则可能图像整体模糊。

3. 直方图特征:灰度分布的概率描述
核心思想:通过统计图像中每个灰度级(通常为0~255)出现的像素数量或概率,构建灰度直方图,进而提取能反映亮度分布模式的统计特征。
直方图定义:设图像灰度级范围为级(如8-bit图像),第级灰度值()的像素数为,则归一化直方图(概率分布)为:

典型直方图特征:
- 直方图均值:与空间域的平均灰度一致,但通过概率加权计算,更强调灰度级的分布贡献。
- 直方图方差:同样反映对比度,但基于概率分布统计,对全局亮度变化的敏感性更高。
- 直方图熵:衡量灰度分布的“混乱程度”(信息量丰富度)。
- 解释:当图像灰度集中在少数级别(如纯黑或纯白背景)时,熵值低(信息单一);当灰度均匀分布(如噪声图像)时,熵值接近最大(信息丰富)。
- 直方图偏斜度与峰态:进一步描述灰度分布的不对称性(偏斜度)和尖锐程度(峰态),辅助判断图像是否存在明显的亮/暗偏向(如逆光拍摄的暗部主导图像)。
二阶直方图特征:通常说的是灰度共生矩阵GLCM,统计图像中任意两个灰度级之间(特定灰度值的像素对)的联合概率分布,反映灰度级之间的相互关系。例如,若图像中存在明显的边缘结构,则二阶直方图会呈现明显的“峰”,对应于边缘两侧灰度级的联合概率。
2. 边界描述
前言
边界描述的核心挑战在于:如何用简洁且具有区分性的方式表示一条可能不规则、噪声敏感的曲线?
本节将介绍两类经典方法——链码描述(基于边界像素的连接方向编码)与傅里叶描述(基于边界的频域全局建模),它们分别从“局部连接路径”和“整体形状频谱”的视角,为边界提供了高效且鲁棒的描述方案。
1. 链码描述:基于方向编码的边界路径追踪
在数字图像中,边界是由一系列离散的像素点组成的,其最简单的表示方法是由美国学者弗里曼Freeman提出的链码方法。
链码实质上是一串指向符的序列,有4向链码、8向链码等。
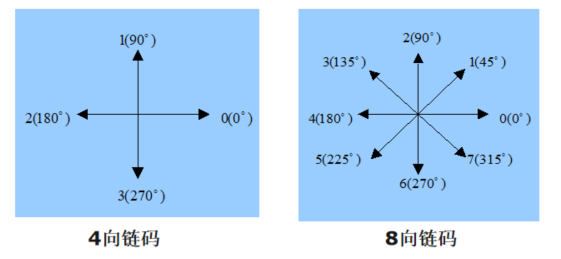
- 4方向链码 :规定像素的4个邻接方向(上、下、左、右),分别用数字0、1、2、3编码(例如:向右为0,向上为1,向左为2,向下为3)。
- 8方向链码 (更常用):扩展为8个邻接方向(包括对角线),用数字0~7编码(例如:正右为0,右上为1,正上为2,...,左下为7)。
逆时针数
- 具体操作时 ,从边界上的某个起始点(通常通过特定算法选择,如最左上角的边界点)开始,依次记录每个边界像素到下一个像素的移动方向数字,最终形成一串链码序列(例如:[0, 2, 5, 7, 3]表示“右→左上→右下→左下→左”的路径)。
结合案例理解:
案例a:
链码表示就是从某一起点开始沿曲线观察每一段的走向,并用相应的指向符来表示,结果形成一个数列。
结合上面的8向链码
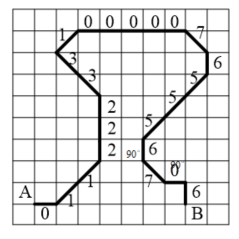
图a曲线的8链码为:01122233100000765556706
当图像进行90度旋转时,差分链码不变,但指向符会发生变化。
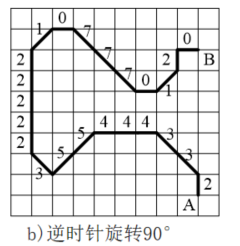
图b曲线的链码为:23344455322222107770120
差分链码:用相邻两个指向符按反方向相减,并对结果作模8运算
链码差分是关于旋转不变的边界描述方法,区域的一些其它性质,如面积和角点,可以由链码直接得
图a的差分链码为:1010010670000777001116
图b的差分链码为:1010010670000777001116
计算过程:(3-2) = 1,(3-3) = 0,(4-3) = 1,(4-4) = 0,···,(0-2) = -2 → 6
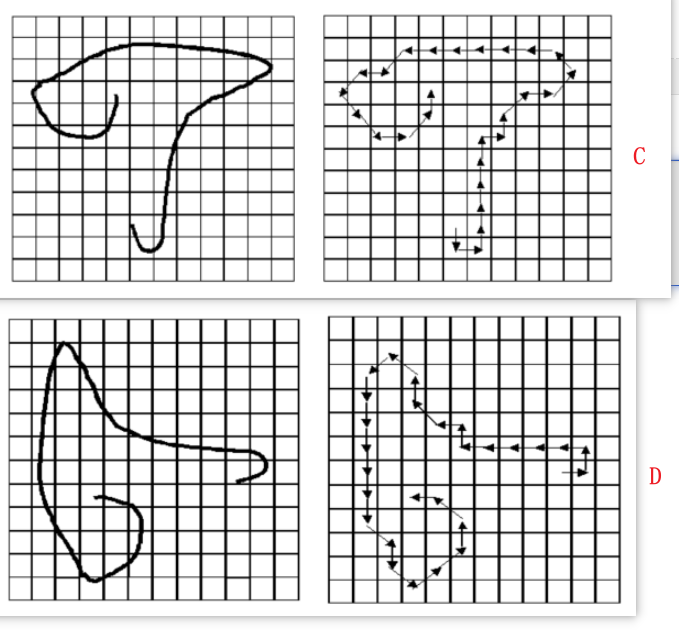
- 图C曲线的链码是:
602222202101344444454577012 - 图C其差分链码是:
22000062771210000017120111 - 图D曲线的链码是:
024444424323566666676711234 - 图D其差分链码是:
22000062771210000017120111
链码的作用:
- 轮廓的紧凑表示(数据压缩)
- 形状特征提取的基础
- 形状匹配与识别(核心应用)
- 使用差分链码进行图像数据库检索(CBIR)
缺点:
- 对噪声敏感:轮廓上的微小噪声会产生非常复杂的链码
- 尺度变化:链码本身不具有尺度不变性,需要先对轮廓进行归一化缩放
- 依赖于轮廓提取的质量:轮廓必须连续且单像素宽,预处理步骤至关重要
2. 傅里叶描述:基于边界的全局频谱建模
傅里叶描述通过将形状的边界表示为复数序列,然后对其进行傅里叶变换,从而得到一系列傅里叶系数,这些系数可以用来描述形状的特征.
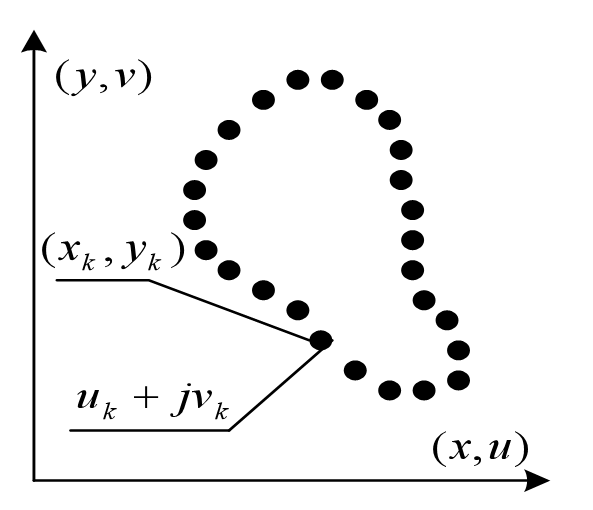
- 形状边界的离散点表示
首先,我们需要将目标形状的边界表示为一系列离散的点。在上图中,这些离散点可以看作是形状边界上的采样点,例如图中的黑色圆点。假设这些点的坐标为(xk,yk),其中k=0,1,2,…,N−1,N是采样点的数量。
2. 复数表示
为了便于进行傅里叶变换,我们通常将二维的坐标(xk,yk),转换为复数形式。具体来说,我们可以将每个点的坐标表示为复数的实部和虚部:
S(k)=u(k)+jv(k), k=0,1,2,…,N−1
其中,u(k)和v(k)分别是坐标的实部和虚部,j平方=-1。这样,形状的边界就可以表示为一个复数序列 S=(S(0),S(1),S(2),…,S(N−1))。
- 复数序列做傅里叶变换

S(w)被称为傅里叶描述子
- 对S(w)做傅里叶反变换,只取S(w)模值最大的p个系数即可得到 s(k)的近似


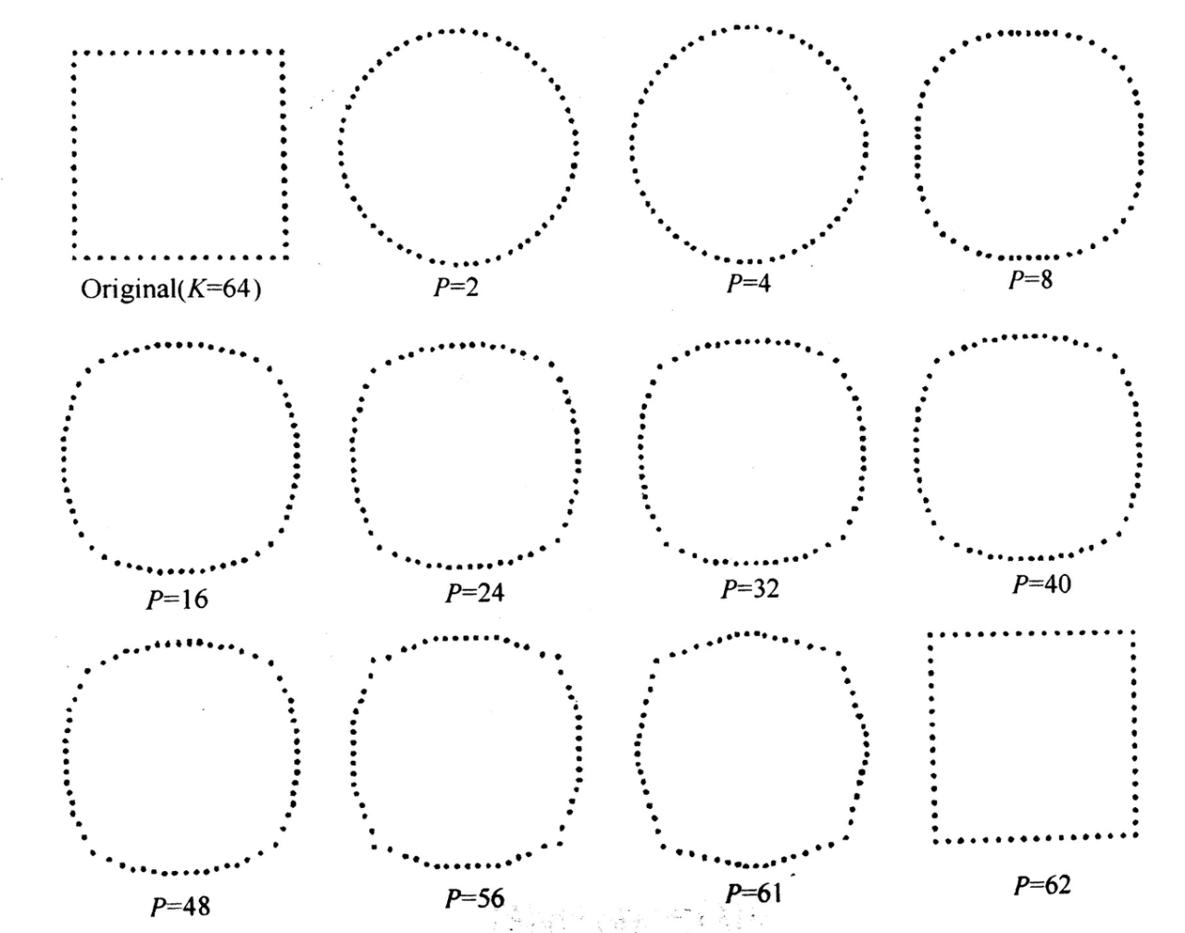
核心思想: 将边界看作平面中的一条闭合曲线(由一系列边界点的坐标序列构成),通过将该坐标序列转换到频域(利用傅里叶变换),提取其不同频率成分的系数作为描述特征
- 低频系数反映边界的整体形状(如大致轮廓的弯曲趋势)
- 高频系数捕捉边界的局部细节(如小的凸起或凹陷)。
这种频域建模方式不仅能压缩边界数据,还能通过系数实现形状的旋转、平移和尺度不变性。
1. 紧凑性与数据压缩
维度降低:原始形状边界由大量离散点表示(如图中众多黑点),数据量较大。通过傅里叶变换后,只需保留少数几个低频傅里叶系数就能近似描述形状。例如,对于一个复杂的多边形边界,可能有成百上千个顶点坐标,但用十几个甚至几个傅里叶系数就可勾勒出其大致轮廓,大大减少了数据存储量和传输带宽需求 。
演示网站:https://www.longluo.me/projects/fourier/
- 几何变换不变性
- 平移不变性 :当形状在平面内发生平移时,其傅里叶变换后的系数仅发生相位的平移,而幅值不变。这意味着无论形状在图像中的位置如何改变,通过分析傅里叶系数的幅值部分,都能识别出是同一个形状。比如一个圆形图案在图像中从左上角移动到右下角,其傅里叶描述子基本保持不变。
- 旋转不变性 :形状旋转一定角度后,傅里叶系数的相位会相应改变,但可以通过对系数进行适当处理(如取模运算等),使得描述子不受旋转角度的影响。这对于在未知方向下识别形状非常有用,像卫星图像中不同朝向的建筑物识别。
- 尺度不变性 :在一定尺度范围内,通过归一化傅里叶系数的某些参数(如第一个非零系数的幅值),可以使描述子对形状的大小变化不敏感。例如,不同大小的同一类零件,经过傅里叶描述处理后,可基于其形状特征进行统一分类。
3. 抗噪声能力
相比直接使用原始边界点进行形状分析,傅里叶描述在一定程度上具有抗噪声能力。噪声通常表现为边界上的微小扰动,在傅里叶变换后,这些高频噪声成分主要集中在高频系数中。通过适当滤除高频系数或者对低频系数进行分析,可以在一定程度上忽略噪声的影响,依然准确地描述形状的本质特征 。
3. 区域描述
前言
在前两节中,我们学习了边界描述的两类方法:
- 通过链码记录边界像素的连接方向(像用“东南西北”的步数描述行走路线),
- 通过傅里叶描述将边界曲线转换到频域,用低频-高频系数捕捉整体轮廓与细节特征。
这些方法本质上都是从“边界”(即形状的外围线条)入手,提取能反映形状宏观结构的特征。
但实际场景中 ,我们不仅关心“边界怎么走”(边界描述),更关心“形状是什么样”(整体几何属性),比如:判断一个图形是“圆”还是“方”,不仅要看它的边缘路径,还要看它的整体大小(面积)、对称性(是否各向均匀)、紧凑程度(是否接近圆形)等内在几何特性。这些特性被称为几何特征,它们是形状最基础的“标签”,也是后续形状分类、识别的关键依据。

更进一步,当我们希望这些几何特征“不受拍摄角度、距离影响”时(比如无论手机正拍还是斜拍一个饭碗,都能认出它是“饭碗”),就需要引入不变矩——一类对平移、旋转、缩放等常见变换保持稳定的特征。
本节我们先学习几何特征(形状的基础直观属性),再理解不变矩(几何特征的升级版——抗干扰能力更强),逐步掌握描述形状本质的核心工具。
1. 几何特征:形状的直观几何属性
几何特征是最容易理解的形状描述方式--->它们直接对应我们肉眼观察到的“大小、多少、位置”等信息。
比如:看到一个苹果,我们会说“它直径约8厘米”(尺寸)、“表面光滑没有洞”(拓扑)、“两端稍微尖一点”(轮廓凹凸);这些描述本质上都是几何特征。
区域面积
二值图像中的目标物面积A是目标物所占的像素点数位置
由于目标在图中中总有一定面积的大小,因此有必要定义目标在图像中的精确位置。如形心,质心等区域周长
区域周长是区域边界的长度。方向
计算目标物体的方向比计算位置要复杂,因为某些形状(圆形)的方向并不是唯一。为了定义唯一的方向,一般假定物体是长方形的,并定义长轴方向为物体的方向。
距离
两个区域的距离,可以用他们的质心距离来计算。有欧式距离,4-邻域距离,8-邻域距离等。圆形度
圆形度是圆形区域的面积与周长的比值。圆形度越大,表示区域越接近圆形。矩形度
描述连通域与矩形相似程度的量。矩形度是矩形区域的面积与周长的比值。矩形度越大,表示区域越接近矩形。长宽比
长宽比是矩形区域的长边与短边的比值。长宽比越大,表示区域越接近长方形。
2. 不变矩:几何特征的升级版
几何特征虽然直观,但有一个明显缺点:对变换敏感 。比如你拍一张正方形的照片,如果手机倾斜拍摄(旋转)、站远一点(缩小)或移动位置(平移),它的“面积”“周长”数值可能不变,但“质心位置”“方向”会变——如果直接用原始几何特征(比如“边界的方向”),不同拍摄条件下的同一个正方形会被误判成不同形状。
矩:是概率论和统计学中用来描述数据分布特征的量,它反映了数据在各个位置上的加权平均。矩可以用来描述数据的集中趋势、离散程度、对称性等特性。矩的作用:用数学数字概括物体的形状。
但现实中,我们看物体常会「变角度」:
- 猫可能站着、躺着、侧身(旋转);
- 拍照时手抖歪了(倾斜);
- 离得近拍显大,离得远拍显小(缩放);
- 甚至镜子里的倒影(镜像)。
**普通的「矩」**会跟着这些变化变:比如猫躺下了,重心位置变了,普通矩的值也会变,那我们用这组数字去识别猫时,就会认不出来 。
不变矩就是为了解决这个问题诞生的:它是一组特殊的几何特征,无论形状如何平移、旋转或缩放,这些特征的数值都保持不变。就像给形状办了一张“身份证”,无论它怎么动、怎么变,身份证上的关键信息(如指纹)始终一致。
常用的不变矩是 7个, 这里不列举数学公式(要看公式,教材的186页),但可以粗糙理解为它们分别对应:
- 描述“整体大小 ”的归一化特征;
- 描述“x/y方向胖瘦比例 ”的特征;
- 描述“倾斜程度 ”的特征;
- 描述“x方向对称性 ”的特征;
- 描述“y方向对称性 ”的特征;
- 描述“综合倾斜+对称性 ”的特征;
- 描述“高阶细节(如凹凸)”的特征。
例题9-1 对图像进行各种几何变换,观察不变矩的变化情况。 👇 👇

图像经过旋转、缩放、平移后的效果如图9-7所示。调用 moment_invariants()子函数可以求得图像的7个不变矩,在子函数中为了减小动态范围,将计算得到的不变矩取对数。各图像的不变矩如上表所示,可见图像经过各种几何变换后所求得的不变矩具有较好的一致性。
代码如下:
import numpy as np
import cv2
from matplotlib import pyplot as plt
%matplotlib inline
%config InlinBackend.figure_format="retina"
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负
img0 = cv2.imread(r'./img/lotus.jpg',0)
img=img0.copy()
textLists=[] #用来存放几何变换名称
imgLists=[] #用来存放几何变换图像
textLists.append("original")
imgLists.append(img)
# 旋转45度
rotate_45_matrix = cv2.getRotationMatrix2D((img.shape[1] // 2, img.shape[0] // 2), -45, 1)
rotate_45_image = cv2.warpAffine(img, rotate_45_matrix, dsize=(img.shape[1], img.shape[0]))
textLists.append("rotate-45")
imgLists.append(rotate_45_image)
# 平移
img=img0.copy()
M = np.float32([[1, 0, 50], [0, 1, 50]])
translation_img = cv2.warpAffine(img, M, dsize=(img.shape[1], img.shape[0]))
textLists.append("translation")
imgLists.append(translation_img)
# 顺时针旋转90
img=img0.copy()
rotate_90_iamge = cv2.rotate(img, rotateCode=cv2.ROTATE_90_CLOCKWISE)
textLists.append("rotate-90")
imgLists.append(rotate_90_iamge)
# 顺时针旋转180
img=img0.copy()
rotate_180_iamge = cv2.rotate(img, cv2.ROTATE_180)
textLists.append("rotate-180")
imgLists.append(rotate_180_iamge)
# 缩小一半
img=img0.copy()
resize_0_5_img=np.zeros(img.shape)
halfImg = cv2.resize(img, (img.shape[1] // 2, img.shape[0] // 2))
resize_0_5_img[0:halfImg.shape[0],0:halfImg.shape[1]]=halfImg
textLists.append("shrink ")
imgLists.append(halfImg)
# 逆时针旋转90
img=img0.copy()
rotate_270_image = cv2.rotate(img, rotateCode=cv2.ROTATE_90_COUNTERCLOCKWISE)
textLists.append("rotate-270")
imgLists.append(rotate_270_image)
huMomentLists=[]
for img in imgLists:
hu=moment_invariants(img)
huMomentLists.append(np.array(hu))
for descipStr,hu in zip(textLists,huMomentLists):
descipStr+="\t"
for mm in hu:
descipStr+="%0.2f"%mm+'\t'
print(descipStr)
plt.figure(figsize=(10,5))
plt.subplot(241)
plt.imshow(img0,cmap="gray")
plt.title("原图像")
plt.axis("off")
plt.subplot(242)
plt.imshow(rotate_45_image,cmap="gray")
plt.title("旋转45度")
plt.axis("off")
plt.subplot(243)
plt.imshow(rotate_90_iamge,cmap="gray")
plt.title("顺时针旋转90")
plt.axis("off")
plt.subplot(244)
plt.imshow(rotate_180_iamge,cmap="gray")
plt.title("顺时针旋转180")
plt.axis("off")
plt.subplot(245)
plt.imshow(rotate_270_image,cmap="gray")
plt.title("逆时针旋转90")
plt.axis("off")
plt.subplot(246)
plt.imshow(resize_0_5_img,cmap="gray")
plt.title("缩小一半")
plt.axis("off")
plt.subplot(247)
plt.imshow(translation_img,cmap="gray")
plt.title("平移")
plt.axis("off")
plt.show()4. 纹理描述
前言
1. 矩分析法
通俗理解:把图像的灰度值看作一堆数字,计算它们的"统计特征":
一阶矩:平均灰度(整体亮度)
二阶矩:方差(对比度,灰度变化剧烈程度)
三阶矩:偏斜度(分布对称性,偏向亮还是暗)
四阶矩:峰度(分布尖锐程度,是否有很多极值)
纹理越粗糙,灰度变化越大,高阶矩的值通常也越大
import cv2
import numpy as np
from scipy import stats
import matplotlib.pyplot as plt
def moment_analysis(image):
"""
矩分析法纹理描述
"""
# 确保是灰度图
if len(image.shape) == 3:
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
else:
gray = image.copy()
# 计算各阶中心矩
moments = {}
# 零阶矩(总灰度值)
m00 = np.sum(gray)
moments['m00'] = m00
# 一阶矩(重心)
height, width = gray.shape
x_coords = np.arange(width)
y_coords = np.arange(height)
m10 = np.sum(x_coords * np.sum(gray, axis=0))
m01 = np.sum(y_coords * np.sum(gray, axis=1))
x_centroid = m10 / m00 if m00 != 0 else 0
y_centroid = m01 / m00 if m00 != 0 else 0
moments['centroid'] = (x_centroid, y_centroid)
# 二阶矩(惯性矩/对比度相关)
x_grid, y_grid = np.meshgrid(x_coords, y_coords)
mu20 = np.sum(((x_grid - x_centroid)**2) * gray)
mu02 = np.sum(((y_grid - y_centroid)**2) * gray)
mu11 = np.sum((x_grid - x_centroid) * (y_grid - y_centroid) * gray)
moments['mu20'] = mu20 # x方向分布
moments['mu02'] = mu02 # y方向分布
moments['mu11'] = mu11 # 相关性
# 统计矩(更直观的纹理描述)
flat_gray = gray.flatten()
moments['mean'] = np.mean(flat_gray) # 一阶矩:平均灰度
moments['variance'] = np.var(flat_gray) # 二阶矩:对比度
moments['skewness'] = stats.skew(flat_gray) # 三阶矩:偏斜度
moments['kurtosis'] = stats.kurtosis(flat_gray) # 四阶矩:峰度
return moments
# 使用示例1
image = cv2.imread('./img/star.png')
# 使用示例2
image = cv2.imread('./img/star11111.png')
moments = moment_analysis(image)
print("矩分析结果:")
for key, value in moments.items():
if isinstance(value, tuple):
print(f"{key}: ({value[0]:.2f}, {value[1]:.2f})")
else:
print(f"{key}: {value:.4f}")矩分析结果:
m00: 40482525.0000 # 总灰度值
centroid: (267.02, 170.38) # 重心
mu20: 1090391467859.2772 # x方向分布
mu02: 439412917170.5587 # y方向分布
mu11: 16838846.5588 # 相关性
mean: 221.6666 # 一阶矩:平均灰度
variance: 7388.9044 # 二阶矩:对比度
skewness: -2.1910 # 三阶矩:偏斜度
kurtosis: 2.8004 # 四阶矩:峰度核心思想 :用统计矩描述纹理的灰度分布规律
优点 :计算简单,物理意义明确
缺点 :对复杂纹理描述能力有限
应用场景 :简单纹理分析、预处理
2. 灰度差分析法
通俗理解: 看相邻像素之间的灰度差异
- 相邻像素灰度差大 → 纹理粗糙、棱角分明(如砂纸)
- 相邻像素灰度差小 → 纹理平滑、细腻(如丝绸)
- 特定方向的灰度差突出 → 纹理有方向性(如木纹、布纹)
常用指标:灰度差绝对值之和、灰度差平方和(类似梯度能量)。
def gray_difference_analysis(image, distance=1):
"""
灰度差分析法纹理描述
"""
if len(image.shape) == 3:
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
else:
gray = image.copy()
height, width = gray.shape
directions = {
'horizontal': (0, 1), # 0°
'vertical': (1, 0), # 90°
'diagonal_45': (1, 1), # 45°
'diagonal_135': (1, -1) # 135°
}
results = {}
for direction, (dx, dy) in directions.items():
diff_sum = 0
diff_sq_sum = 0
count = 0
for y in range(height - abs(dy)*distance):
for x in range(width - abs(dx)*distance):
# 当前像素
current = gray[y, x]
# 相邻像素(考虑距离和方向)
neighbor = gray[y + dy*distance, x + dx*distance]
# 计算绝对差和平方差
diff_abs = abs(current - neighbor)
diff_sq = (current - neighbor) ** 2
diff_sum += diff_abs
diff_sq_sum += diff_sq
count += 1
# 归一化(除以像素对数)
results[f'{direction}_abs_mean'] = diff_sum / count if count > 0 else 0
results[f'{direction}_energy'] = diff_sq_sum / count if count > 0 else 0
# 总体粗糙度(所有方向平均)
all_diffs = list(results.values())
results['overall_roughness'] = np.mean(all_diffs)
return results
# 使用示例1 纹理粗糙的
diff_results = gray_difference_analysis(image)
# 使用示例2 纹理细腻的
# 使用示例3 木纹
print("\n灰度差分析结果:")
for key, value in diff_results.items():
print(f"{key}: {value:.4f}")灰度差分析结果:
horizontal_abs_mean: 0.0000 # 水平方向灰度差绝对值之和
horizontal_energy: 0.0008 # 水平方向灰度差平方和
vertical_abs_mean: 0.0000 # 垂直方向灰度差绝对值之和
vertical_energy: 0.0004 # 垂直方向灰度差平方和
diagonal_45_abs_mean: 0.0000 # 45°方向灰度差绝对值之和
diagonal_45_energy: 0.0007 # 45°方向灰度差平方和
diagonal_135_abs_mean: 0.0000 # 135°方向灰度差绝对值之和
diagonal_135_energy: 0.0007 # 135°方向灰度差平方和
overall_roughness: 0.0003 # 总体粗糙度核心思想:分析像素间灰度的变化频率和幅度
优点:能捕捉纹理的粗糙度、方向性
缺点:对噪声敏感,参数选择重要
应用场景:方向性纹理、边缘检测
3. 灰度共生矩阵法(GLCM)
通俗理解:最强大的纹理分析方法!核心是:统计"相距一定距离、成特定角度的两个像素,灰度值分别为i和j"这种情况出现的次数。
比如:
- 看所有"右边相邻像素"(距离=1,角度=0°)的组合
- 统计(灰度=10, 灰度=50)出现了多少次,(灰度=20, 灰度=20)出现了多少次...
- 形成一个矩阵,这个矩阵就包含了纹理的空间关系信息
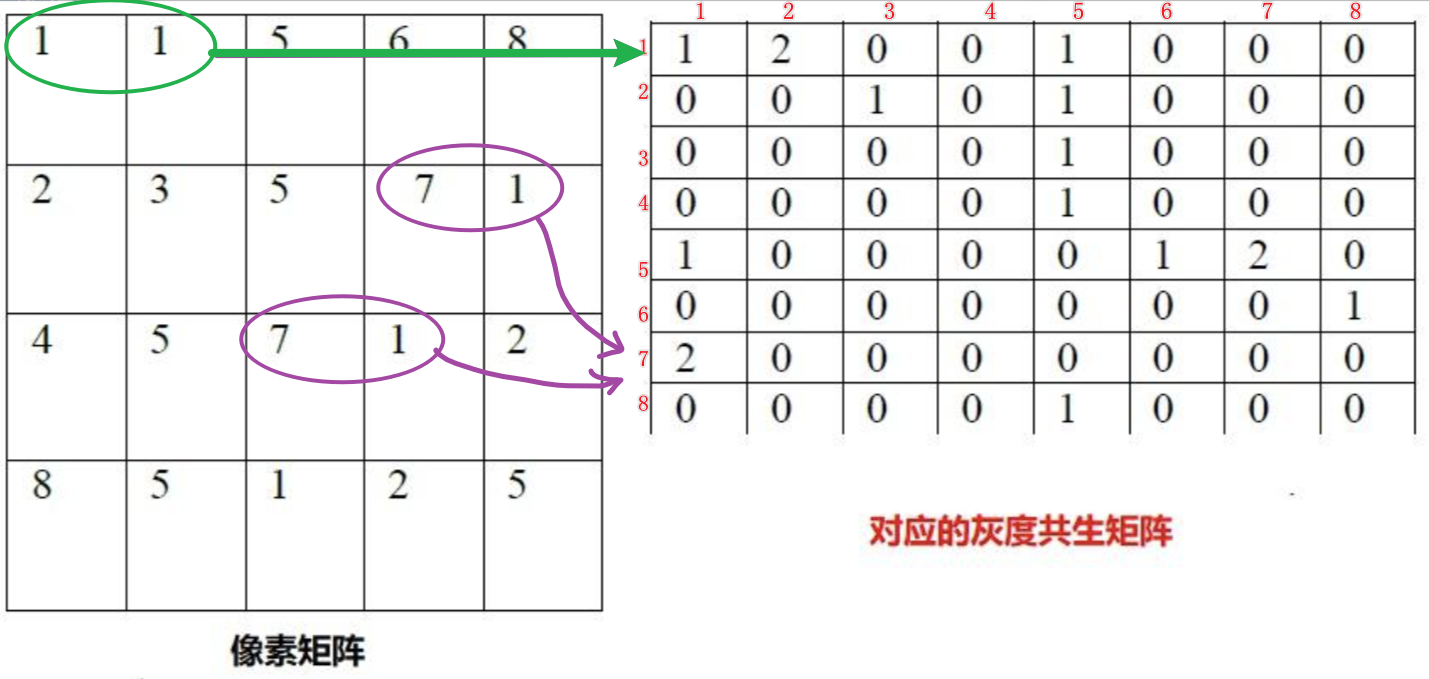
从这个矩阵可以提取:对比度、能量、熵等14种特征。
核心思想: 统计特定空间关系下像素对的出现概率
优 点 :描述能力强,理论基础坚实
缺 点 :计算量大,参数多
适用场景: 复杂纹理分类、识别