
第五章 图像复原
1. 图像复原的基本概念
前言
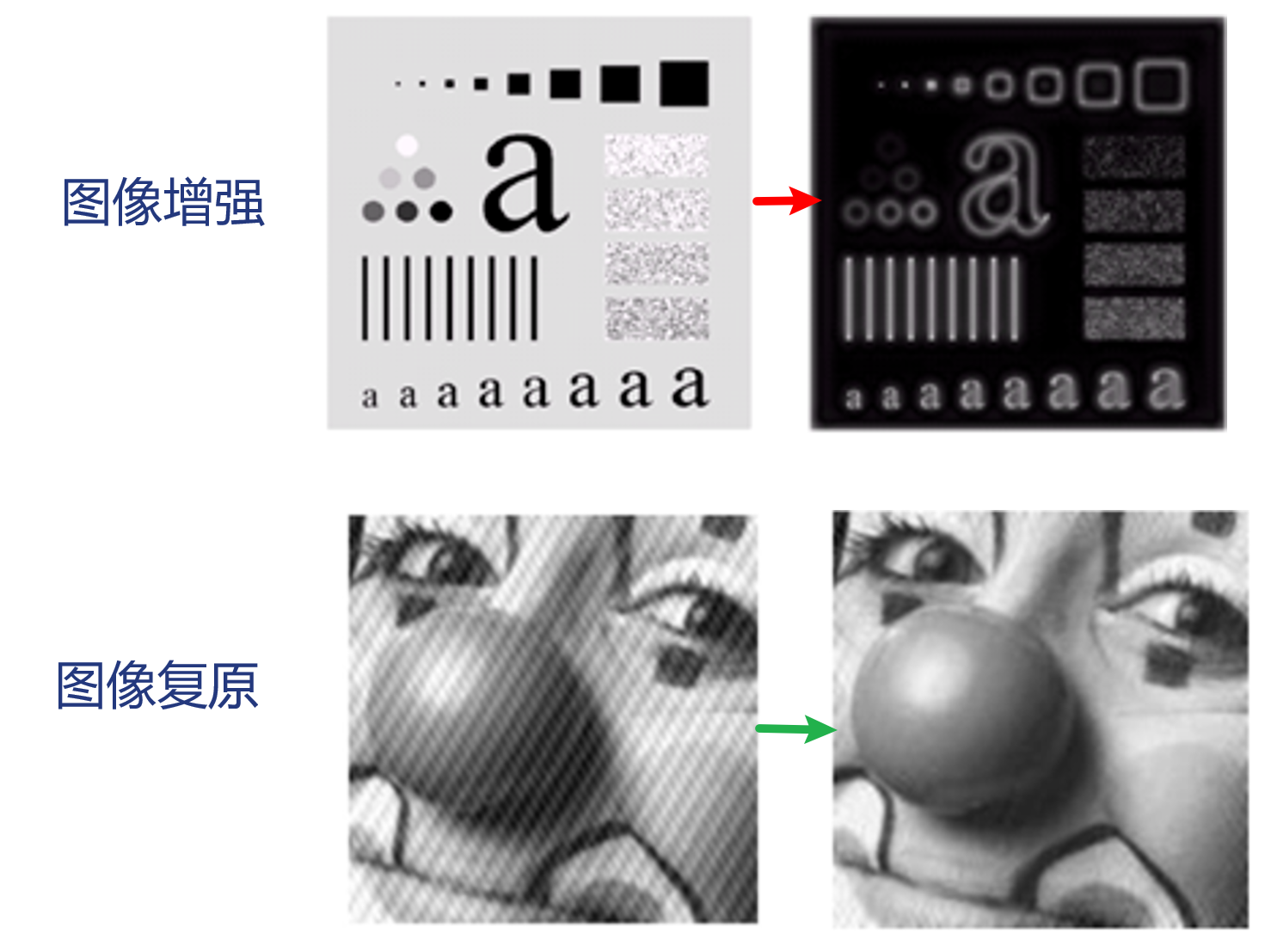
图像复原是将降质了的图像恢复成原来的图像。根据引起图像退化的原因以及降质的先验知识,建立退化模型,再针对降质过程采取相反的方法来恢复图像。
图像的质量下降叫做退化 。退化的形式有模糊、失真、有噪声等。如果我们对 退化的类型、机制和过程 都十分清楚,那么就可以利用其 反过程来复原图像。
一、 下面列子哪个是复原,哪个是增强
1️⃣ 修复一张旧照片,目标是去除上面的划痕、污渍和褪色,让它看起来像刚拍出来时一样 。你有一个它本应如何应如何的目标。
2️⃣ 给一张正常的照片添加滤镜,比如提高饱和度让色彩更鲜艳,或者增加对比度让细节更突出。目的是让它“更好看 ”或“更有用 ”,而不是纠正错误。
答案:案例1是复原,案例2是增强
二、 核心区别
| 特征 | 图像复原 | 图像增强 |
|---|---|---|
| 目标 | 客观保真度 - 逼近原始未退化的真实图像 | 主观质量 - 改善视觉效果或特定应用下的可用性 |
| 基础 | 依赖于退化模型(物理/数学) | 依赖于人的视觉心理或后续任务的需求 |
| 评判标准 | 均方误差 (MSE)、峰值信噪比 (PSNR) 等定量等定量指标 | 主要依靠人眼的主观判断,难以用统一标准衡量 |
| 处理方式 | 通常是反向过程,如反卷积、滤波 | 通常是正向映射,如灰度变换、空间滤波 |


三、 两者的紧密联系与协同工作
1️⃣ 尽管目标和思想不同,但在实际应用中,二者并非泾渭分明,而是常常协同工作,形成一个图像质量提升的提升的管道:
互补关系: 一幅图像可能需要先进行复原,再进行增强。 👇
例如: 在医学影像中:
第一步(复原): 使用算法去除CT图像中的设备噪声和伪影,这是复原。
第二步(增强): 然后对去噪后的噪后的图像进行对比度增强,使医生能更清晰地分辨病变组织,这是增强。
目标一致:最终目的都是为了让图像变得“更好”。 👈 👈
对于高级视觉任务(如图像识别、自动驾驶),一个清晰的、高质量的输入图像至关重要 。无论是通过复原手段得到干净的数据,还是通过增强手段突出关键特征,都是在为下游任务 服务。
2.噪声模型和噪声仿真
噪声模型
在之前的图像处理学习中,我们已经了解了图像的构成和各种增强技术。大家可能会发现,无论算法多么优秀,在实际应用中,图像质量常常会受到一个关键因素的挑战——噪声 。它就像是声音中的杂音,会干扰信息的纯净度。今天,我们就来系统地认识一下几种常见的图像噪声,并学习如何在Jupyter Notebook中模拟它们,这将为我们后续学习图像去噪技术打下坚实的基础。
一、常见图像噪声模型简介
噪声可以理解为在图像获取或传输过程中,由于传感器、信道或处理电路等因素引入的随机干扰。根据其概率密度函数(PDF)的不同,我们可以将其分为多种类型。
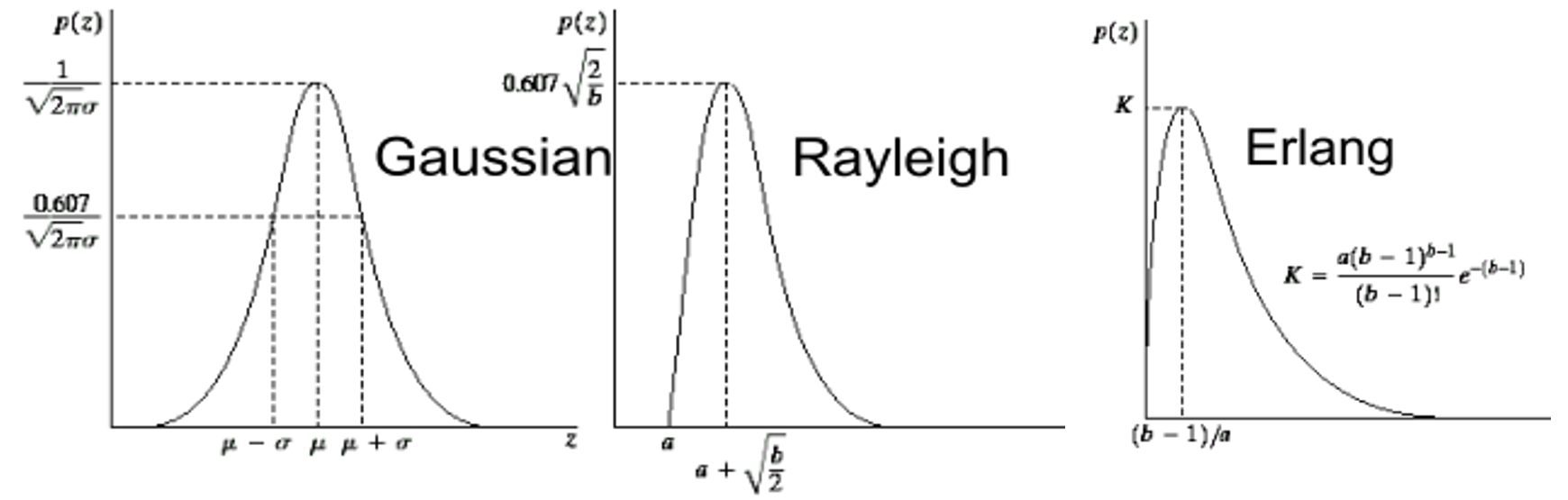
1. 高斯噪声 (Gaussian Noise)
这是最常见、最广为人知的一种噪声模型。正如自然界中许多随机变量都服从正态分布一样,高斯噪声也因其普遍性而成为我们研究噪声的噪声的起点。
- 特点: 其PDF服从高斯分布(即正态分布)。它在图像中表现为每个像素值上都叠加了一个微小的、随机的灰度变化。
- 成因: 主要来源于电子电路噪声,如传感器在高温工作时的热噪声。
- 直观感受:看起来像是一层细腻层细腻的“沙粒”或“薄膜”覆盖在图像上。
2. 瑞利噪声利噪声 (Rayleigh Noise)
当我们离开完美的对称世界(高斯),就会遇到一些有偏态的分布。瑞利噪声就是其中之一,它的分布形状不像高斯那样对称。
- 特点:PDF服从瑞利分布。该分布在原点处从0开始,形状向右偏移。
- 成因:常见于某些雷达成像以及医学超声图像中。
- 直观感受:对图像整体亮度的改变比高斯噪声更不均匀。
3. 伽马噪声 (Gamma Noise) / 厄兰噪声 (Erlang Noise)
伽马噪声是另一个非对称分布的典型代表,它与瑞利噪声类似,但形态可以由参数控制,更为灵活。
- 特点 :PDF服从伽马分布(当形状参数为参数为整数时,也称为厄兰分布)。其曲线也是从0开始,向右偏斜。
- 成因 :在激光成像等应用中较为常见。
- 直观感受 :与瑞利噪声效果相似,都会导致图像出现偏向某一侧的亮度失真。

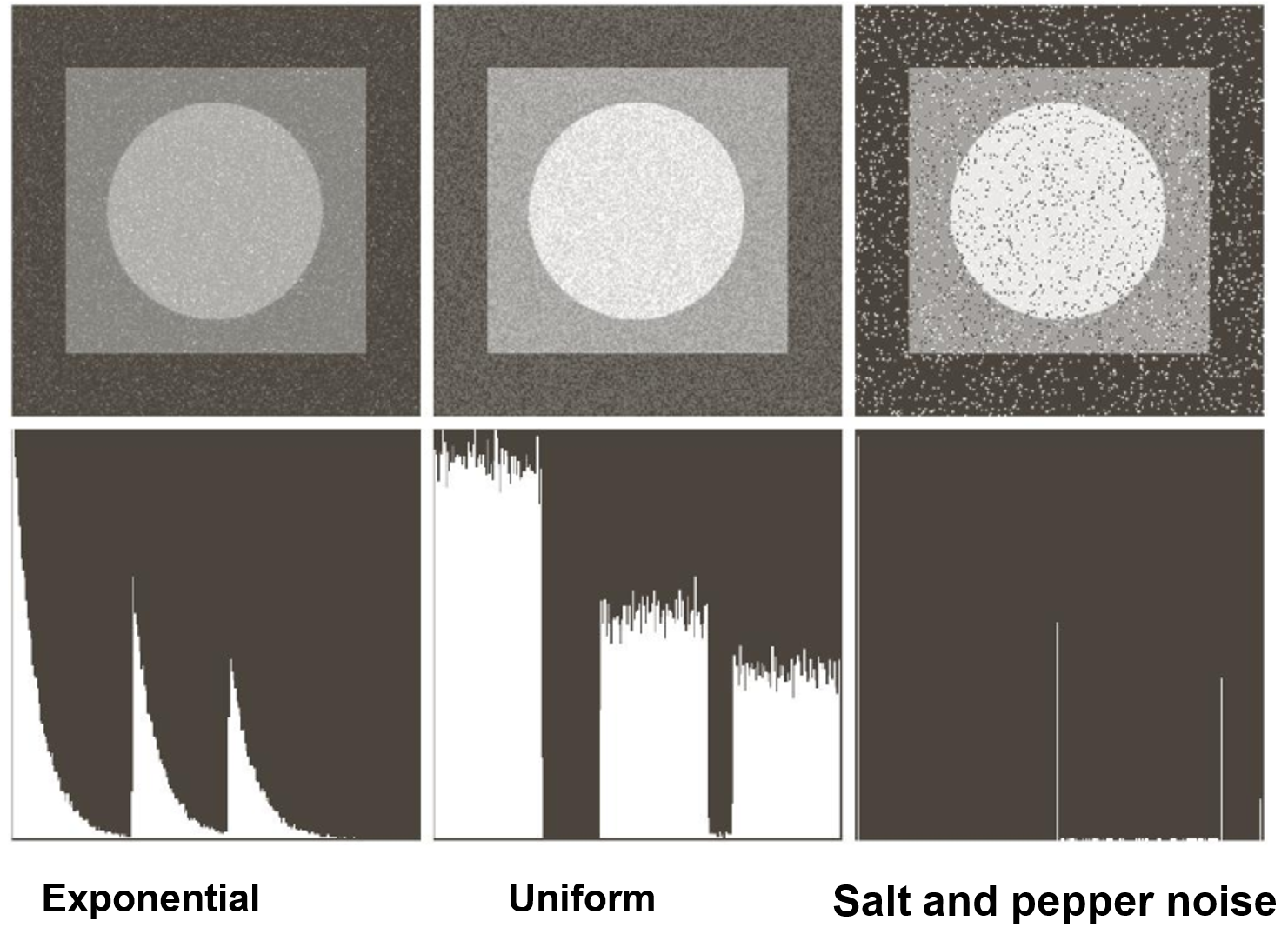
4. 指数噪声 (Exponential Noise)
如果我们把伽马噪声的特例推到极致,就得到了指数噪声。它是伽马分布在形状参数为1时的特殊形式。
- 特点:PDF服从指数分布。它是所有噪声模型中模型中衰减最“慢”的一种,有一个很长的“尾巴”。
- 成因:在激光成像中偶有出现。
- 直观感受:会产生比较强烈的、孤立的亮点或暗点区域
5. 均匀噪声 (Uniform Noise)
前面几种噪声的概率都不是均等的,现在我们来看一种最简单的等概率噪声——均匀噪声。
- 特点 特点:PDF服从均匀分布。在一个给定的范围内,每个噪声值的出现概率是完全相同的。
- 成因:通常在仿真实验中作为其他噪声的基础,或者在量化误差中起到中起到一定作用。
- 直观感受:给图像增加了一种相对平缓、颗粒感一致的随机纹理。
6. 椒盐噪声 (Salt-and-Pepper Noise) / 脉冲噪声 (Impulse Noise)
最后,我们来认识一种风格迥异的噪声。它与前五种连续的加性噪声不同,是一种极端的、离散的替换性噪声。
- 特点:像素值会以一定的概率被突然置为极小值(胡椒,黑色)或极大值(盐粒,白色,白色)。
- 成因:通常由快速的瞬态干扰引起,例如,例如相机传感器上的坏点、传输信道的误码等。
- 直观感受:图像上随机散布着纯白和纯黑的像素点,就像撒了椒盐一样。

二、噪声仿真代码
下面我们将在一张干净的图像上,逐一添加上述噪声,并观察效果。
import numpy as np
import matplotlib.pyplot as plt
import cv2
# 设置中文字体
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def add_gaussian_noise(image, mean=0, sigma=25):
"""
添加高斯噪声 - 服从正态分布,适合模拟传感器噪声
Args:
image: 输入图像
mean: 噪声均值
sigma: 噪声标准差
"""
noise = np.random.normal(mean, sigma, image.shape)
noisy_image = np.clip(image.astype(np.float32) + noise, 0, 255)
return noisy_image.astype(np.uint8)
def add_rayleigh_noise(image, scale=30):
"""
添加瑞利噪声 - 在雷达图像处理中常见
Args:
image: 输入图像
scale: 瑞利分布的尺度参数
"""
noise = np.random.rayleigh(scale, image.shape)
noisy_image = np.clip(image.astype(np.float32) + noise, 0, 255)
return noisy_image.astype(np.uint8)
def add_gamma_noise(image, shape=2.0, scale=10.0):
"""
添加伽马噪声 - 适合模拟某些光学成像系统的噪声
Args:
image: 输入图像
shape: 伽马分布的形状参数
scale: 伽马分布的尺度参数
"""
noise = np.random.gamma(shape, scale, image.shape)
noisy_image = np.clip(image.astype(np.float32) + noise, 0, 255)
return noisy_image.astype(np.uint8)
def add_exponential_noise(image, scale=25.0):
"""
添加指数噪声 - 在激光成像中常见
Args:
image: 输入图像
scale: 指数分布的尺度参数
"""
noise = np.random.exponential(scale, image.shape)
noisy_image = np.clip(image.astype(np.float32) + noise, 0, 255)
return noisy_image.astype(np.uint8)
def add_uniform_noise(image, low=-20, high=20):
"""
添加均匀噪声 - 最简单的随机噪声
Args:
image: 输入图像
low: 均匀分布的下界
high: 均匀分布的上界
"""
noise = np.random.uniform(low, high, image.shape)
noisy_image = np.clip(image.astype(np.float32) + noise, 0, 255)
return noisy_image.astype(np.uint8)
def add_salt_pepper_noise(image, salt_prob=0.01, pepper_prob=0.01):
"""
添加椒盐噪声 - 模拟图像传输中的脉冲噪声
Args:
image: 输入图像
salt_prob: 盐噪声概率(白点)
pepper_prob: 椒噪声概率(黑点)
"""
noisy_image = image.copy()
salt_mask = np.random.random(image.shape) < salt_prob
pepper_mask = np.random.random(image.shape) < pepper_prob
noisy_image[salt_mask] = 255
noisy_image[pepper_mask] = 0
return noisy_image
# 主程序
try:
# 加载图像(如果指定路径不存在,使用内置示例)
image_path = './img/train_.jpg'
# 尝试加载指定图像,如果失败则创建示例图像
try:
img = cv2.imread(image_path)
if img is None:
raise FileNotFoundError
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
print(f"成功加载图像: {image_path}")
except:
# 创建示例图像:256x256的渐变灰度图
print("未找到指定图像,创建示例图像...")
gray_img = np.zeros((256, 256), dtype=np.uint8)
for i in range(256):
gray_img[i, :] = i # 创建垂直渐变
print("已创建示例渐变图像")
# 添加各种噪声
print("正在为图像添加各种噪声...")
noisy_images = [
gray_img,
add_gaussian_noise(gray_img),
add_rayleigh_noise(gray_img),
add_gamma_noise(gray_img),
add_exponential_noise(gray_img),
add_uniform_noise(gray_img),
add_salt_pepper_noise(gray_img)
]
titles = [
'原始灰度图像',
'高斯噪声 (μ=0, σ=25)',
'瑞利噪声 (scale=30)',
'伽马噪声 (shape=2, scale=10)',
'指数噪声 (scale=25)',
'均匀噪声 (low=-20, high=20)',
'椒盐噪声 (salt=1%, pepper=1%)'
]
# 创建图像显示
plt.figure(figsize=(18, 12))
for i in range(7):
plt.subplot(3, 3, i+1)
plt.imshow(noisy_images[i], cmap='gray')
plt.title(titles[i], fontsize=12)
plt.axis('off')
plt.tight_layout()
plt.show()
# 显示噪声统计信息
print("\n" + "="*60)
print("噪声类型说明:")
print("="*60)
print("1. 高斯噪声: 服从正态分布,适合模拟传感器噪声")
print("2. 瑞利噪声: 在雷达图像处理中常见")
print("3. 伽马噪声: 适合模拟某些光学成像系统的噪声")
print("4. 指数噪声: 在激光成像中常见")
print("5. 均匀噪声: 最简单的随机噪声")
print("6. 椒盐噪声: 模拟图像传输中的脉冲噪声")
print("="*60)
except Exception as e:
print(f"程序执行出错: {e}")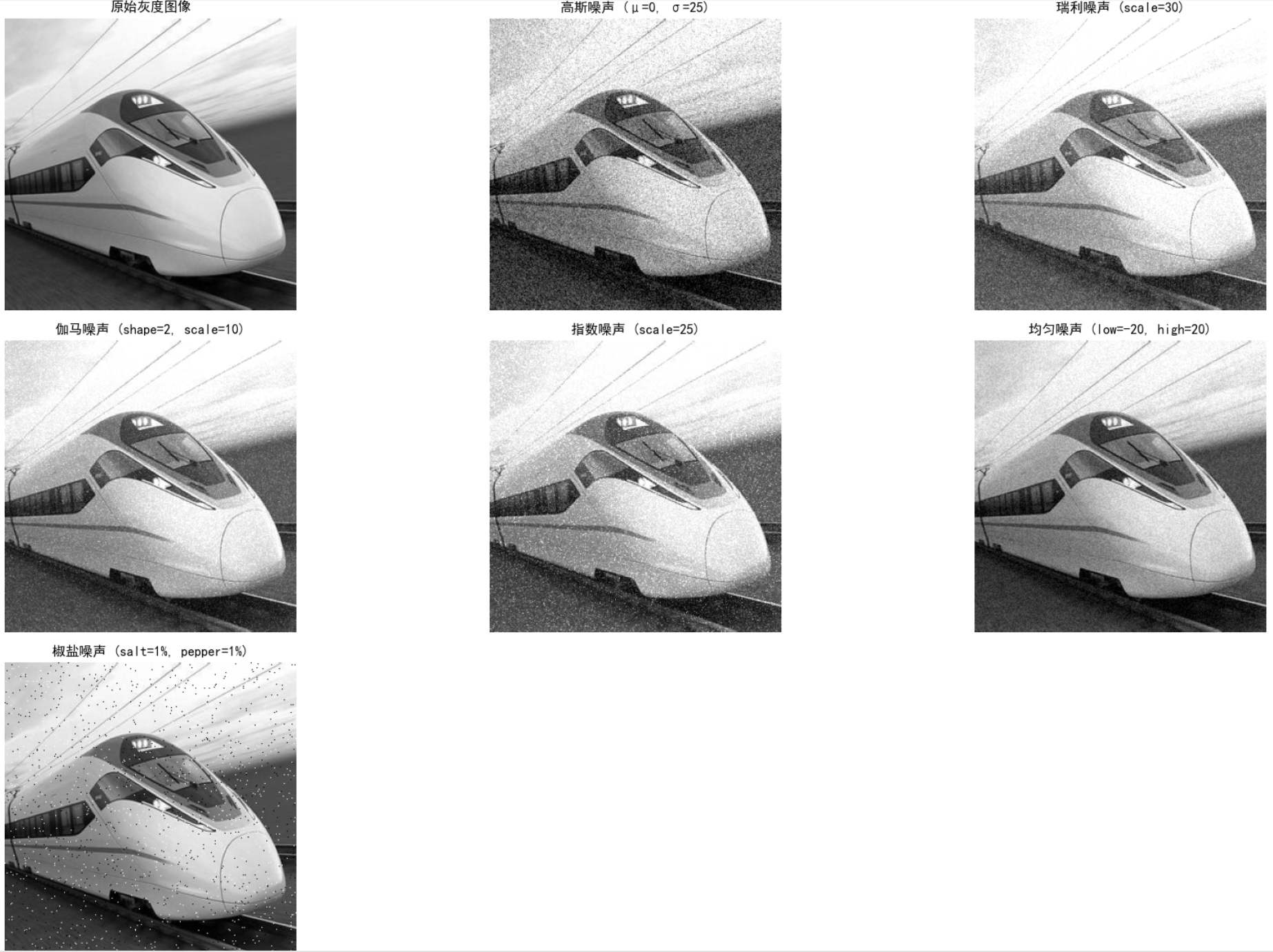
3.滤波去噪方法之空域滤波
滤波去噪方法
在前面的学习案例中,我们看到不同类型噪声对图像造成了各异的破坏。现在,我们要拿起"工具箱 "里的各种滤波器,针对性地修复这些损伤。
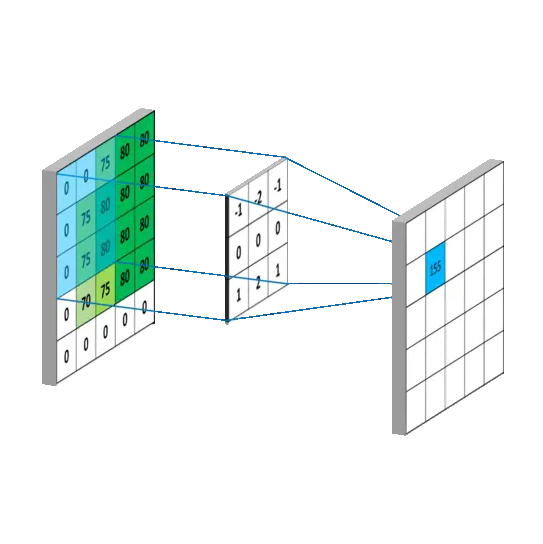
空域滤波直接在图像像素上进行操作,通过在局部邻域内执行特定运算来估计真实像素值。
主要分为三类: 👇
- 均值滤波系列:通过邻域平均来平滑噪声
- 顺序统计滤波:基于排序的鲁棒方法
- 自适应滤波: 智能调整参数的先进技术
下面我们逐一详细介绍每种滤波器的工作原理和应用场景。
一、均值滤波家族
均值滤波器的基本思想是用邻域内像素的平均值来代替中心像素,从而抑制噪声。
1. 算术均值滤波 (Arithmetic Mean Filter)
这是最简单直接的均值滤波器。
工作原理:
- 定义一个大小为m×n的滑动窗口
- 计算窗口内所有像素的算术平均值
- 用该用该平均值替换中心像素值
数学表达式:
f(x,y) = (1/mn) × Σg(s,t)
(s,t)∈S_xyg(s,t)为退化图像,f(x,y)为去噪的估计图像
优缺点:
✅ 优点:计算简单,对高斯噪声有一定效果
❌ 缺点:会导致图像模糊,丢失边缘细节
2. 几何均值滤波 (Geometric Mean Filter)
相比算术均值,几何均值能保留更多图像细节。
工作原理:
- 计算邻域内所有像素值的乘积,并累加
- 对该乘积开1/nm次方
数学表达式:
f(x,y) = [Π g(s,t)]^(1/mn)
(s,t)∈S_xyg(s,t)为退化图像,f(x,y)为去噪的估计图像
优缺点:
✅ 优点:比算术均值更好的细节保存能力
❌ 缺点:对零值敏感(乘积为零则结果为0)
3. 谐波均值滤波 (Harmonic Mean Filter)
对盐噪声(白点)特别有效。
工作原理:
计算邻域内像素值的倒数之和
用邻域像素总数除以这个和
数学表达式:
f(x,y) = mn / Σ [1/g(s,t)]
(s,t)∈S_xyg(s,t)为退化图像,f(x,y)为去噪的估计图像
4. 逆谐波均值滤波 (Contra-harmonic Mean Filter)
这是最灵活的均值滤波器,可通过参数Q来控制滤波行为。
工作原理:
计算邻域内像素值的(Q+1)次方次方之和
除以像素值的Q次方之和
数学表达式:
f(x,y) = Σ [g(s,t)]^(Q+1) / Σ [g(s,t)]^Q
(s,t)∈S_xy (s,t)∈S_xyg(s,t)为退化图像,f(x,y)为去噪的估计图像
滤波行为控制:
Q > 0:消除胡椒噪声
Q < 0:消除盐噪声
Q = 0:退化为算术均值滤波
Q = -1:退化为谐波均值滤波
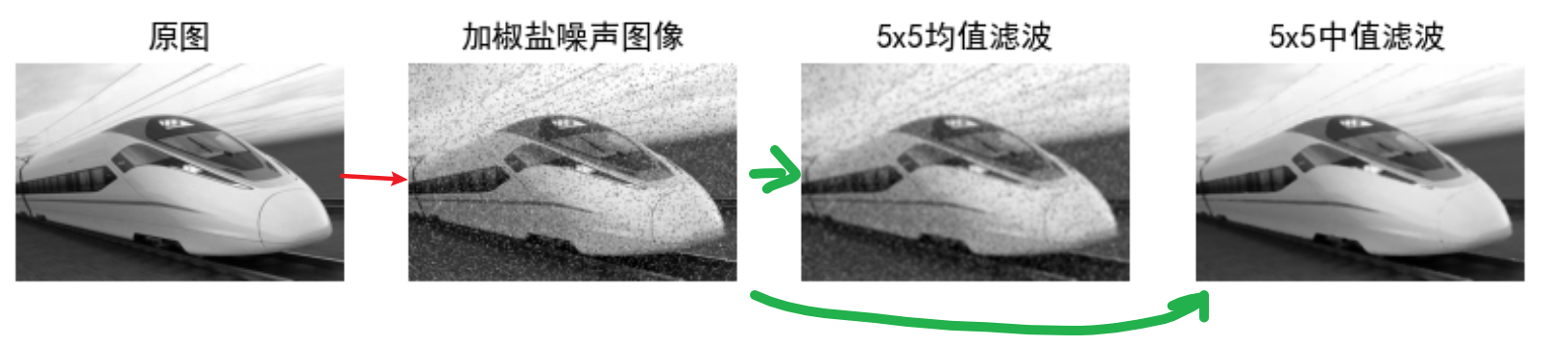
二、中值滤波及其改进
5. 标准中值滤波 (Median Filter)
非线性滤波的代表,对脉冲噪声极其有效。
工作原理:
- 将邻域内像素值按从小到大排序
- 取中间位置的数值作为中心像素的新值
数学表达式:
g(x,y) = median {f(s,t)}
(s,t)∈S_xy优缺点:
✅ 优点:有效去除椒盐噪声,保持边缘清晰
❌ 缺点:对大窗口会过度平滑,损失细节
6. 自适应中值滤波 (Adaptive Median Filter)
智能化的中值滤波,能自动调整策略。
承上启下:标准中值滤波虽然强大,但在高噪声密度下性能下降,且固定窗口尺寸不够灵活。自适应中值滤波应运而生,它像一个经验丰富的医生,会根据"病情"调整"治疗方案"。
核心优势:
🎯 动态调整窗口大小
🔍 区分噪声点和信号点
💡 在高噪声密度下仍保持良好性能
算法流程:
阶段A:判断中值是否受污染
A1 = Z_med - Z_min
A2 = Z_med - Z_maxZ_med: S_xy集合中灰度值的中值
Z_min: S_xy集合中灰度值最小值
Z_max: S_xy集合中灰度值最大值
如果A1>0且A2<0,转到阶段B;否则增大窗口尺寸,重复阶段A直到达到最大窗口尺寸。
阶段B:判断中心像素是否受污染
B1 = Z_xy - Z_min
B2 = Z_xy - Z_max如果B1>0且B2<0,输出Z_xy(认为是信号);否则输出Z_med(认为是噪声)
三、知识总结:🍐❤️ 👈
📊 均值滤波族:适合高斯类噪声,但会模糊图像
⚡ 中值滤波:椒盐噪声的克星,保边效果好
🤖 自适应滤波:智能化选择,适应复杂场景
4. 滤波去噪方法之频域滤波
前言
在掌握了空域滤波的各种技巧之后,我们现在要进入一个更加宏观和强大的领域——频域滤波
如果说 空域滤波 像是我们用放大镜一寸寸地修复照片,那么频域滤波就如同一位音乐指挥家,他能看到整个乐谱的频率组成,精准地减弱不和谐的杂音,同时保留主旋律的完整性。这种方法不是直接在像素上操作,而是先将图像变换到频率域,在那里噪声往往具有独特的"声纹特征",使我们能够更精确地靶向清除。

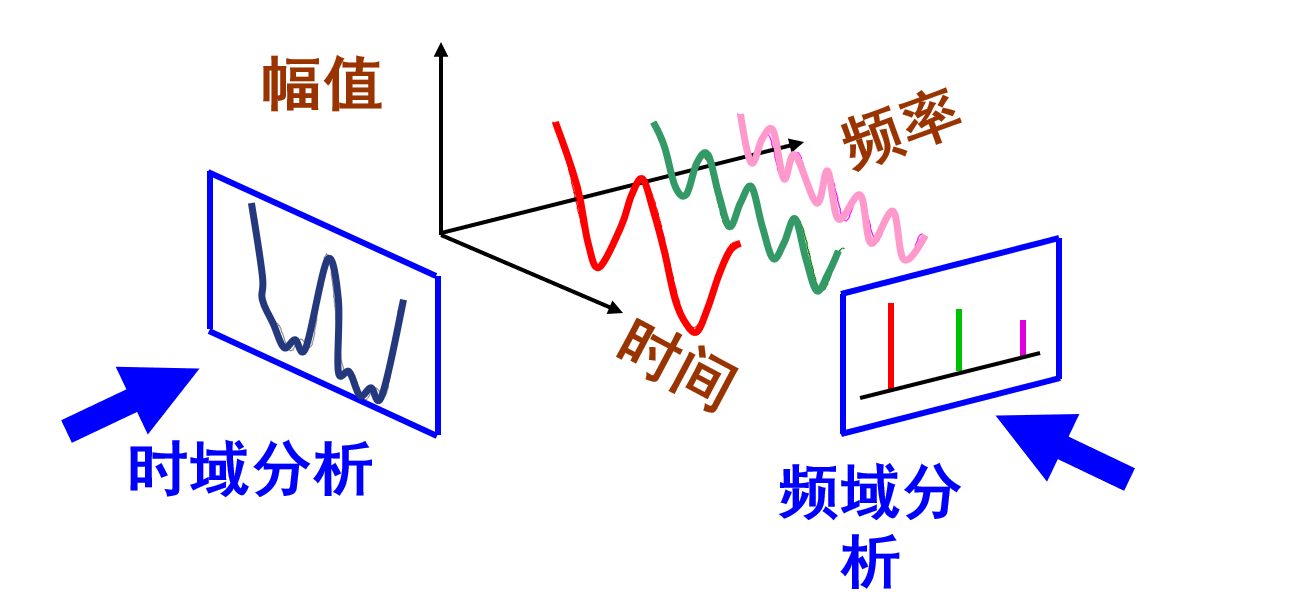
频域滤波的基本原理
核心思想: 任何图像都可以分解为不同频率的正弦波组合。
低频成分: 对应图像的平坦区域、总体轮廓
高频成分: 对应图像的边缘、细节、噪声
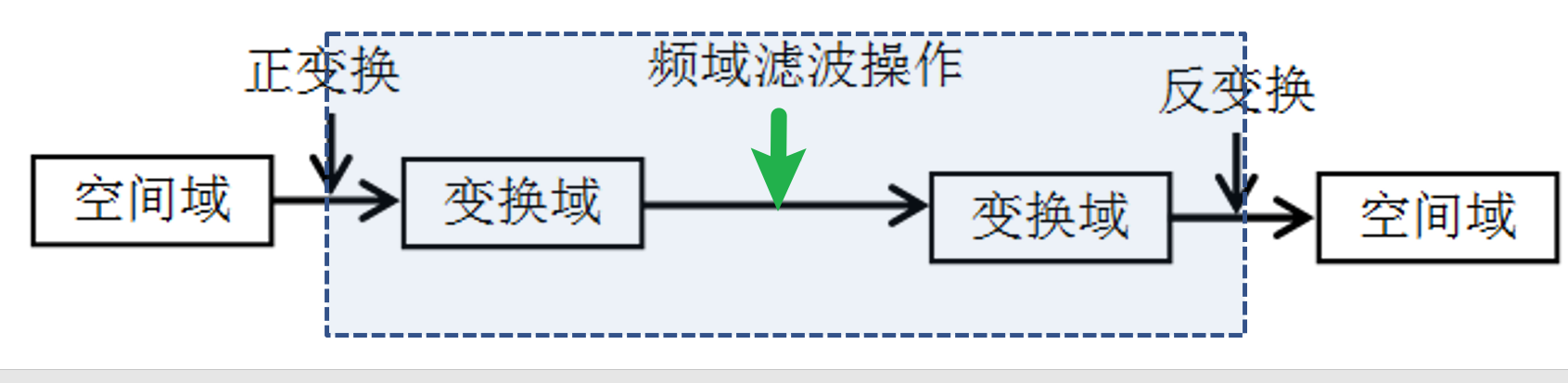
处理流程:
- 正向傅里叶变换 :将图像从空域转换到频域
- 频域滤波: 在频域中修改频率成分
- 逆向傅里叶变换 :将处理后的结果还原回空域
一、带阻滤波器 (Band-Reject Filters)
在现实中,很多噪声并不是遍布所有频率,而是集中在某个特定的频率带上。比如周期性噪声(来自扫描仪振动、电气干扰等)就在频域中表现为孤立的亮点。带阻滤波器就像是一个频率范围的"剪刀 ",专门剪掉这些特定的噪声带 。
1.1 理想带阻滤波器 (Ideal Band-Reject Filter)
最直接的阻断方式,但有明显的振铃效应。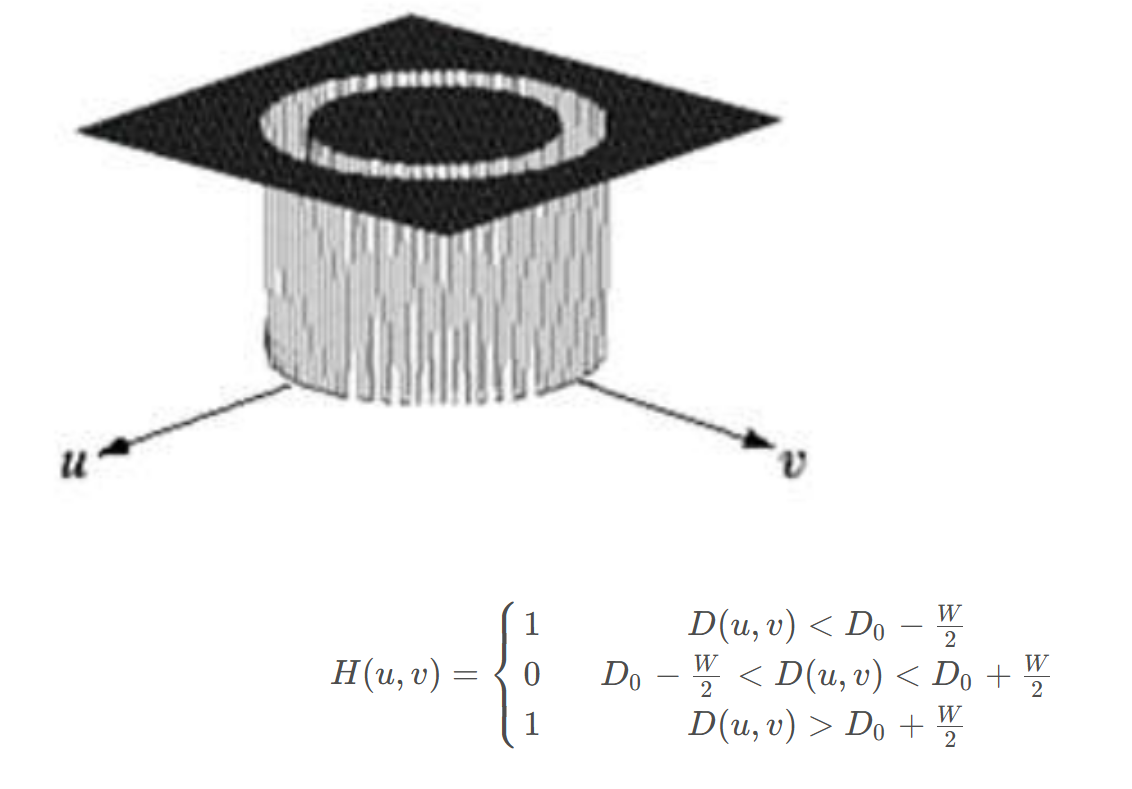
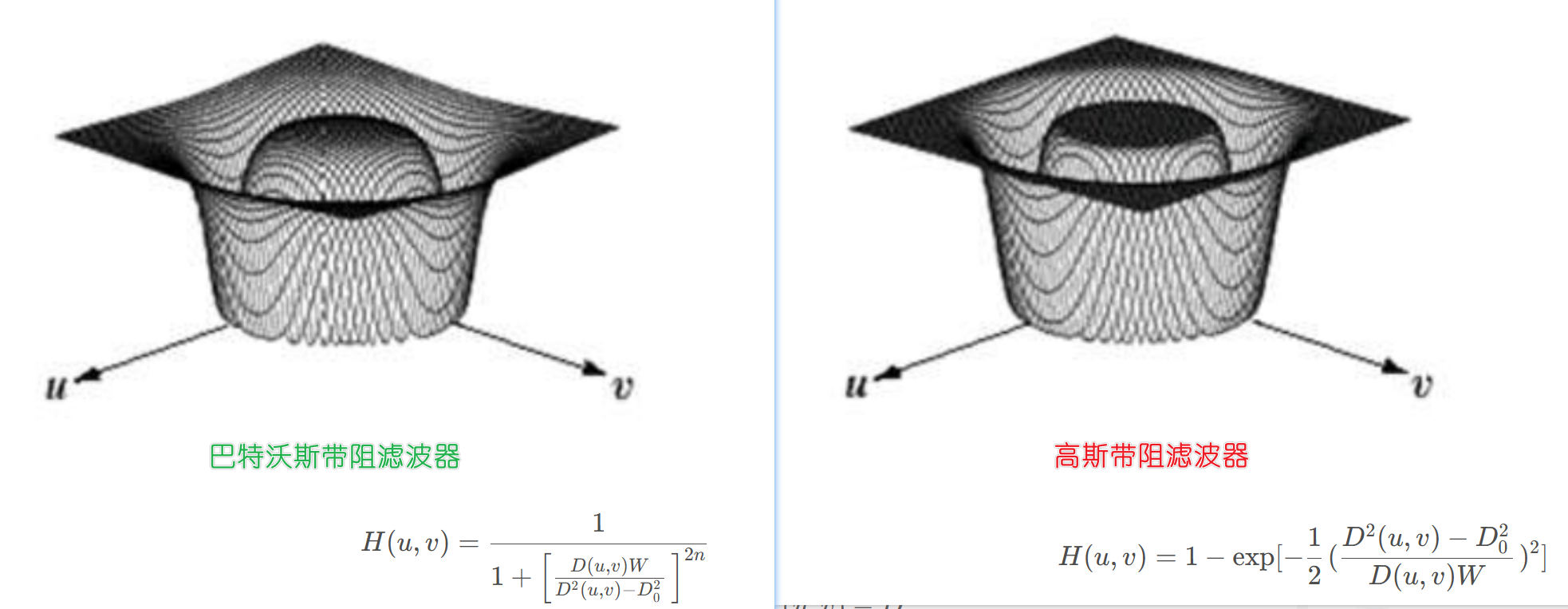
1.2 高斯带阻滤波器 (Gaussian Band-Reject Filter)
过渡平滑,避免了振铃效应
二、陷波滤波器 (Notch Filters)
带阻滤波器虽然有用,但它有时过于粗暴 ,会把有用的频率信息也一起阻断。陷波滤波器则像是一位精确的外科医生,只切除病灶,尽可能保留健康组织.
2.1 基本原理
目标:选择性去除特定频率点处的干扰
特点:在频域中针对多个离散的噪声点进行处理
优势:比带阻滤波器更具选择性
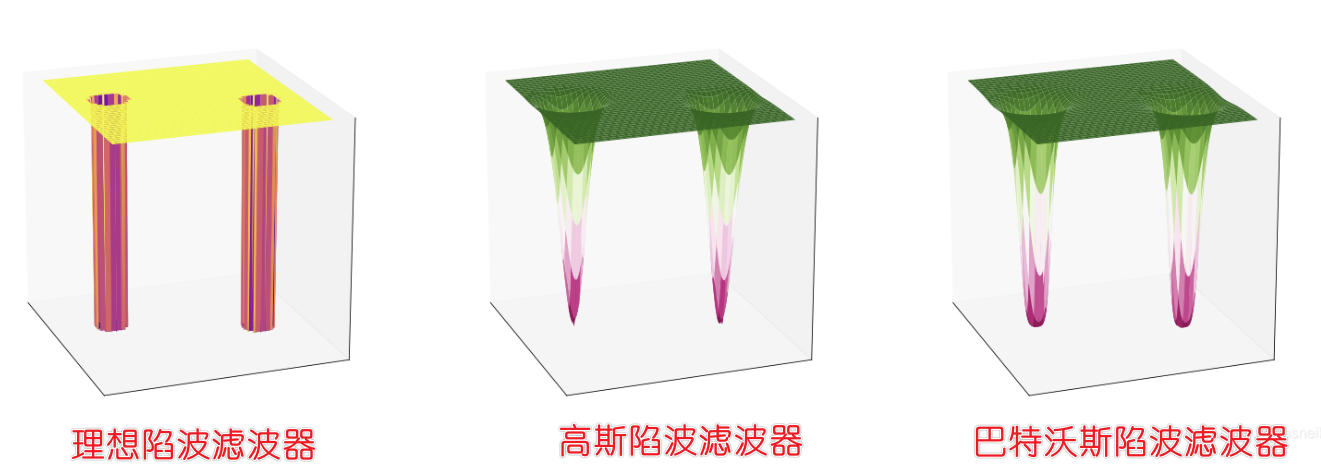
三、二值遮罩滤波器 (Binary Mask Filters)
有时候,最高效的方法就是最简单的方法。二值遮罩滤波器采用"非黑即白"的策略,在频域中直接用0或1来允许或阻止频率成分通过。
基本原理
思想:手工或半自动地在频域中绘制遮罩
适用场景:噪声模式不规则,无法用简单的数学公式描述
灵活性:可以根据具体问题的需求定制
注意事项:傅里叶变换具有对称性,因此遮罩的绘制需要考虑到这一点
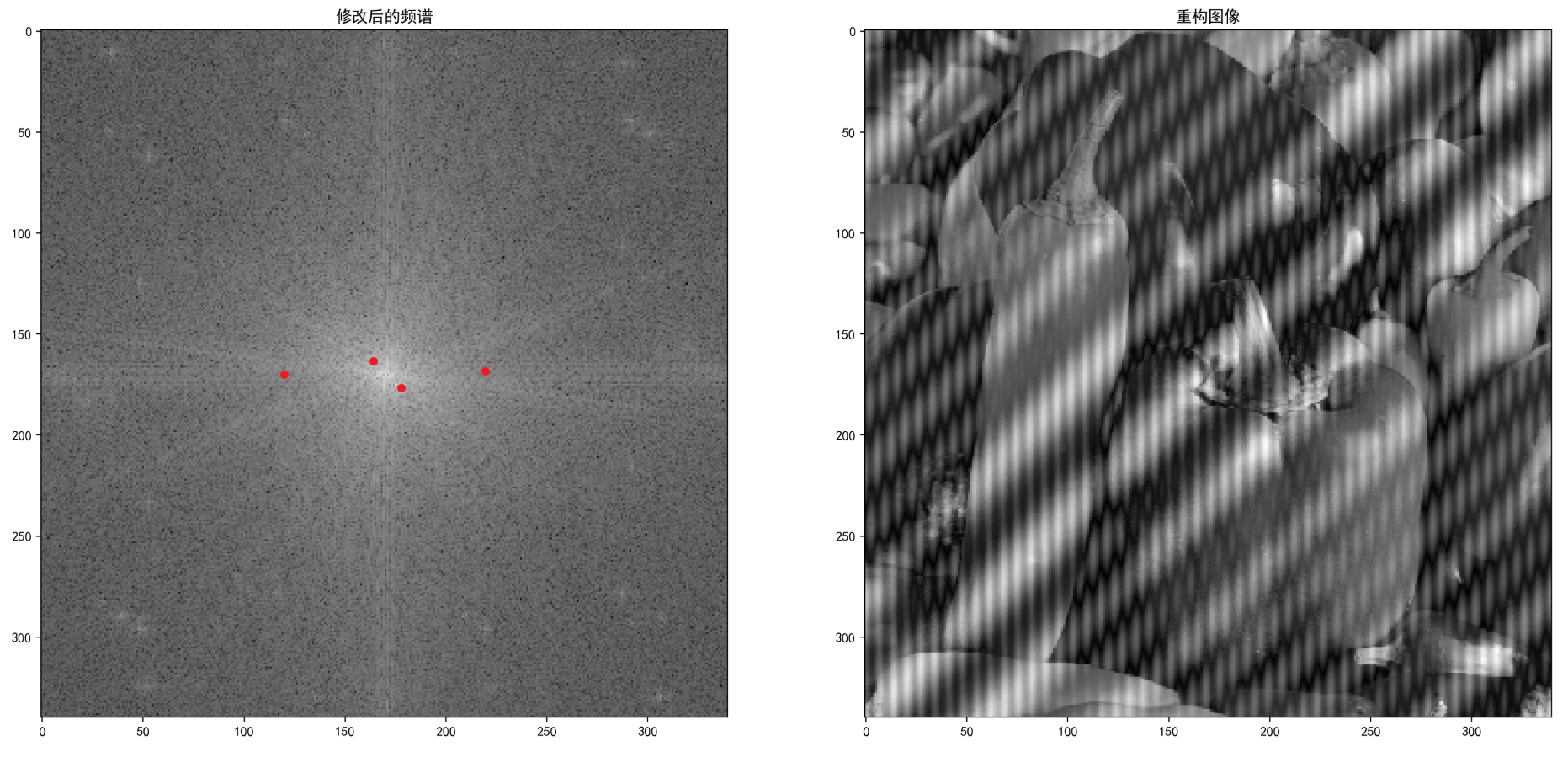
四、案例演示
- 案例图片制作
import cv2
import numpy as np
from matplotlib import pyplot as plt
%matplotlib inline
%config InlineBackend.figure_format="retina"
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负号
# 读取图像并转换为灰度图
img = cv2.imread(r'./img/peppers.bmp',0)
# 对图像进行二维傅里叶变换
F = np.fft.fft2(img)
# 将频谱的零频率分量移到频谱中心
fshift0 = np.fft.fftshift(F)
# 创建频谱的副本用于修改
G = fshift0.copy()
# 获取频谱的最大幅值
fmax = np.max(np.abs(fshift0))
# 获取图像尺寸
m, n = F.shape
# 计算图像中心坐标
u0, v0 = m//2, n//2 # 图像中心
# 第一组频率点:在垂直方向上偏移
r1 = 50
u1 = u0
v1 = v0 - r1 # 中心上方50像素
G[u1, v1] = fmax/5 # 设置该频率点的幅值为最大值的1/5
# 设置对称点(根据傅里叶变换的对称性)
u2 = m - 1 - u1
v2 = n - 1 - v1
G[u2, v2] = fmax/5
# 创建显示窗口
plt.figure(figsize=(20, 10))
# 显示修改后的频谱(使用对数变换增强可视化效果)
plt.subplot(121)
plt.imshow(20*np.log(1+abs(G)), cmap='gray')
plt.title('修改后的频谱')
# 逆变换:将频谱移回原始位置
f1 = np.fft.ifftshift(G)
# 逆傅里叶变换重构图像
img1 = abs(np.fft.ifft2(f1))
# 显示重构后的图像
plt.subplot(122)
plt.imshow(img1, cmap='gray')
plt.title('重构图像')
# 保存图像img1
cv2.imwrite('./img/peppers_new.jpg', img1)
plt.show()- 各种滤波器展示
import cv2
import numpy as np
from matplotlib import pyplot as plt
%matplotlib inline
%config InlineBackend.figure_format="retina"
plt.rcParams['font.sans-serif'] = ['SimHei'] # 正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 正常显示负号
# 读取含噪声的图像并转换为灰度图
try:
img = cv2.imread('./img/peppers_new.jpg', 0) # 0表示以灰度图模式读取
if img is None:
raise FileNotFoundError
print(f"成功加载图像,尺寸: {img.shape}")
except FileNotFoundError:
print("未找到图像文件,创建示例噪声图像用于演示...")
# 创建含水平周期噪声的示例图像
img = np.zeros((512, 512), dtype=np.uint8)
for i in range(512):
for j in range(512):
img[i, j] = 128 + 64 * np.sin(0.15*j) # 水平周期噪声
img = np.clip(img, 0, 255).astype(np.uint8)
# 显示原始含噪声图像
plt.figure(figsize=(8, 6))
plt.imshow(img, cmap='gray')
plt.title('含水平周期噪声的原始图像')
plt.axis('off')
plt.show()
# ============================================================================
# 傅里叶变换与频谱分析
# ============================================================================
def image_fft(image):
"""对图像进行傅里叶变换并返回中心化频谱"""
f = np.fft.fft2(image) # 傅里叶变换
fshift = np.fft.fftshift(f) # 频谱中心化
magnitude_spectrum = 20 * np.log(np.abs(fshift) + 1) # 幅度谱(用于显示)
return fshift, magnitude_spectrum
def image_ifft(fshift):
"""对中心化频谱进行逆傅里叶变换并返回重构图像"""
f_ishift = np.fft.ifftshift(fshift) # 逆中心化
img_back = np.fft.ifft2(f_ishift) # 逆傅里叶变换
img_back = np.abs(img_back) # 取模值(实部)
return np.clip(img_back, 0, 255).astype(np.uint8)
# 对噪声图像进行傅里叶变换
noisy_freq, noisy_spectrum = image_fft(img)
# 显示噪声图像的频谱(水平噪声对应频谱中的垂直线)
plt.figure(figsize=(8, 6))
plt.imshow(noisy_spectrum, cmap='gray')
plt.title('噪声图像的频谱图(垂直线对应水平噪声)')
plt.axis('off')
plt.colorbar(label='对数幅度')
plt.show()
# ============================================================================
# 三种滤波器实现(陷波和二值遮罩针对水平方向噪声)
# ============================================================================
def create_gaussian_bandreject_filter(shape, d0=30, w=10):
"""创建高斯带阻滤波器(针对垂直频谱线,即水平噪声)"""
rows, cols = shape
u, v = np.meshgrid(np.arange(cols), np.arange(rows))
# 计算到中心的距离
d = np.sqrt((u - cols/2)**2 + (v - rows/2)**2)
# 高斯带阻滤波器公式
gbr = 1 - np.exp(-0.5 * ((d**2 - d0**2) / (d * w + 1e-6))**2)
return gbr
def create_gaussian_notch_filter(shape, notch_centers, radius=5):
"""创建高斯陷波滤波器(针对水平方向噪声,精确消除垂直线频谱)"""
rows, cols = shape
u, v = np.meshgrid(np.arange(cols), np.arange(rows))
h = np.ones((rows, cols)) # 初始化为全1矩阵(全通)
for (u0, v0) in notch_centers:
# 计算到陷波中心的距离
d = np.sqrt((u - u0)**2 + (v - v0)**2)
# 高斯陷波(在陷波中心区域衰减)
notch = 1 - np.exp(-(d**2) / (2 * radius**2))
h *= notch
# 处理共轭对称点(傅里叶变换对称性要求)
u_conj = cols - u0
v_conj = rows - v0
d_conj = np.sqrt((u - u_conj)**2 + (v - v_conj)**2)
notch_conj = 1 - np.exp(-(d_conj**2) / (2 * radius**2))
h *= notch_conj
return h
def create_binary_mask_filter(shape, notch_centers, radius=5):
"""创建二值遮罩滤波器(针对水平方向噪声,完全遮挡垂直线频谱)"""
rows, cols = shape
u, v = np.meshgrid(np.arange(cols), np.arange(rows))
h = np.ones((rows, cols)) # 初始化为全1矩阵(全通)
for (u0, v0) in notch_centers:
# 计算到陷波中心的距离
d = np.sqrt((u - u0)**2 + (v - v0)**2)
# 创建圆形遮罩,在半径内的点设为0(完全阻隔)
mask = d <= radius
h[mask] = 0
# 处理共轭对称点
u_conj = cols - u0
v_conj = rows - v0
d_conj = np.sqrt((u - u_conj)**2 + (v - v_conj)**2)
mask_conj = d_conj <= radius
h[mask_conj] = 0
return h
# ============================================================================
# 噪声频率分析与滤波处理(针对水平方向噪声)
# ============================================================================
rows, cols = img.shape
center_u, center_v = cols // 2, rows // 2 # 频谱中心
# 水平噪声在频谱中表现为垂直线,设置这些噪声线位置(针对水平方向噪声)
noise_centers = [
(center_u - 50, center_v), # 左侧垂直线噪声 大家注意了,修改这里可以改参数,将黑色区域覆盖白点,观察效果图
(center_u + 50, center_v) # 右侧垂直线噪声(对称点)
]
# 创建三种滤波器
print("创建三种滤波器...")
# 1. 高斯带阻滤波器(针对垂直频谱线,即水平噪声)
gbr_filter = create_gaussian_bandreject_filter(
shape=img.shape,
d0=50, # 噪声频率中心(与垂直线位置对应)
w=15 # 带宽
)
# 2. 高斯陷波滤波器(精确消除垂直线频谱,针对水平噪声)
gn_filter = create_gaussian_notch_filter(
shape=img.shape,
notch_centers=noise_centers, # 垂直线噪声位置
radius=6 # 陷波半径,黑色圈圈的大小
)
# 3. 二值遮罩滤波器(完全遮挡垂直线频谱,针对水平噪声)
bm_filter = create_binary_mask_filter(
shape=img.shape,
notch_centers=noise_centers, # 垂直线噪声位置
radius=6 # 遮罩半径 ,黑色圈圈的大小
)
# 应用滤波器并重构图像
print("应用滤波器并重构图像...")
# 高斯带阻滤波
gbr_freq = noisy_freq * gbr_filter
gbr_img = image_ifft(gbr_freq)
gbr_spectrum = 20 * np.log(np.abs(gbr_freq) + 1)
# 高斯陷波滤波(针对水平噪声)
gn_freq = noisy_freq * gn_filter
gn_img = image_ifft(gn_freq)
gn_spectrum = 20 * np.log(np.abs(gn_freq) + 1)
# 二值遮罩滤波(针对水平噪声)
bm_freq = noisy_freq * bm_filter
bm_img = image_ifft(bm_freq)
bm_spectrum = 20 * np.log(np.abs(bm_freq) + 1)
# ============================================================================
# 滤波结果对比显示
# ============================================================================
# 创建对比显示窗口
plt.figure(figsize=(18, 16))
# 原始图像与频谱
plt.subplot(4, 3, 1)
plt.imshow(img, cmap='gray')
plt.title('原始含水平噪声图像')
plt.axis('off')
plt.subplot(4, 3, 2)
plt.imshow(noisy_spectrum, cmap='gray')
plt.title('原始频谱(垂直线为噪声)')
plt.axis('off')
# 高斯带阻滤波结果
plt.subplot(4, 3, 4)
plt.imshow(gbr_filter, cmap='gray')
plt.title('高斯带阻滤波器')
plt.axis('off')
plt.subplot(4, 3, 5)
plt.imshow(gbr_spectrum, cmap='gray')
plt.title('带阻滤波后频谱')
plt.axis('off')
plt.subplot(4, 3, 6)
plt.imshow(gbr_img, cmap='gray')
plt.title('带阻滤波后图像')
plt.axis('off')
# 高斯陷波滤波结果(针对水平噪声)
plt.subplot(4, 3, 7)
plt.imshow(gn_filter, cmap='gray')
plt.title('高斯陷波滤波器(水平噪声)')
plt.axis('off')
plt.subplot(4, 3, 8)
plt.imshow(gn_spectrum, cmap='gray')
plt.title('陷波滤波后频谱')
plt.axis('off')
plt.subplot(4, 3, 9)
plt.imshow(gn_img, cmap='gray')
plt.title('陷波滤波后图像(水平噪声消除)')
plt.axis('off')
# 二值遮罩滤波结果(针对水平噪声)
plt.subplot(4, 3, 10)
plt.imshow(bm_filter, cmap='gray')
plt.title('二值遮罩滤波器(水平噪声)')
plt.axis('off')
plt.subplot(4, 3, 11)
plt.imshow(bm_spectrum, cmap='gray')
plt.title('遮罩滤波后频谱')
plt.axis('off')
plt.subplot(4, 3, 12)
plt.imshow(bm_img, cmap='gray')
plt.title('遮罩滤波后图像(水平噪声消除)')
plt.axis('off')
plt.tight_layout()
plt.show()
# ============================================================================
# 滤波效果定量分析
# ============================================================================
def calculate_psnr(original, filtered):
"""计算峰值信噪比(评估去噪效果)"""
mse = np.mean((original - filtered) ** 2)
return 20 * np.log10(255.0 / np.sqrt(mse)) if mse > 0 else float('inf')
# 计算三种方法的PSNR(以最佳滤波结果为参考)
ref_img = np.mean([gbr_img, gn_img, bm_img], axis=0).astype(np.uint8)
psnr_gbr = calculate_psnr(ref_img, gbr_img)
psnr_gn = calculate_psnr(ref_img, gn_img)
psnr_bm = calculate_psnr(ref_img, bm_img)
# 并排显示三种滤波结果
plt.figure(figsize=(18, 6))
plt.subplot(1, 3, 1)
plt.imshow(gbr_img, cmap='gray')
plt.title(f'高斯带阻滤波 (PSNR: {psnr_gbr:.2f} dB)')
plt.axis('off')
plt.subplot(1, 3, 2)
plt.imshow(gn_img, cmap='gray')
plt.title(f'高斯陷波滤波 (PSNR: {psnr_gn:.2f} dB)')
plt.axis('off')
plt.subplot(1, 3, 3)
plt.imshow(bm_img, cmap='gray')
plt.title(f'二值遮罩滤波 (PSNR: {psnr_bm:.2f} dB)')
plt.axis('off')
plt.tight_layout()
plt.show()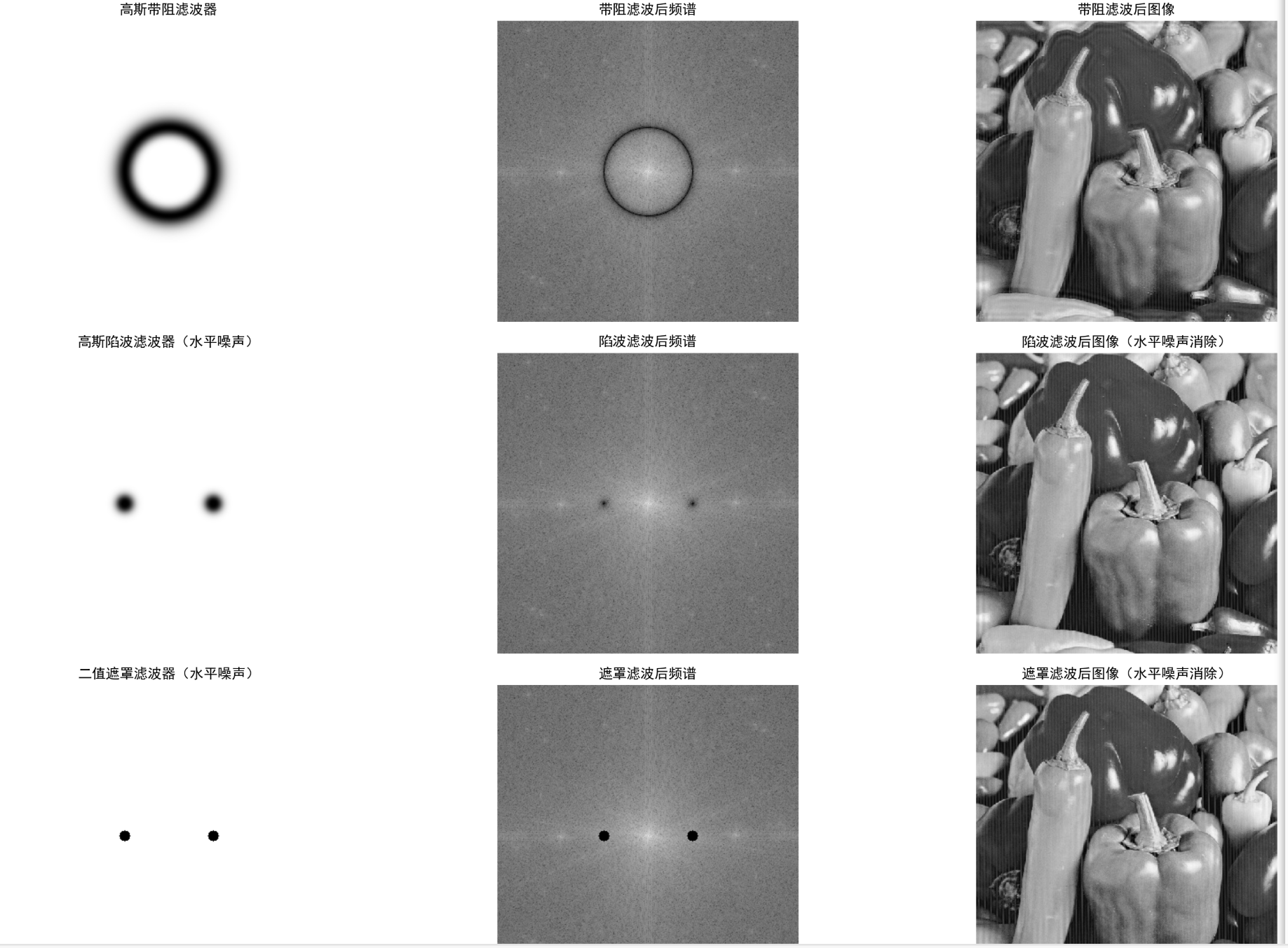
关键结论:
- PSNR全称:峰值信噪比(Peak Signal-to-Noise Ratio),表示信号与噪声的比值,越大越好。单位是dB。
- 水平周期噪声在频谱中表现为垂直线条,通过消除这些线条可有效去噪
- 高斯陷波滤波效果最佳:精准去除噪声频率,同时保留图像细节
- 二值遮罩滤波虽然能去除噪声,但容易引入振铃效应
- 高斯带阻滤波适合噪声频率分布较宽的场景,但可能损失部分细节
5. 图像退化模型
图像退化模型
一、引言:什么是图像退化?
图像复原 实际上是图像退化的逆过程,如果弄清楚了图像退化的过程,那么久可以利用其逆过程来复原图片。
图像退化是指图像在形成、传输或记录过程中,由于各种因素导致质量下降的现象。
就像用老式相机拍摄快速移动的物体,或者透过毛玻璃看东西,图像会变得模糊不清。
图像退化就像"看花眼",想象你戴着脏眼镜看世界:
- 镜片上的污渍让所有东西都变模糊 → 这就是"退化"
- 不同污渍造成不同模糊效果 → 不同的"退化模型"

二、图像退化模型的基本概念
2.1 退化过程数学模型
图像退化可以表示为:
g(x,y) = h(x,y) * f(x,y) + η(x,y)其中:👇
f(x,y):原始清晰图像
h(x,y):退化函数(点扩散函数PSF)
*:卷积操作
η(x,y):加性噪声
g(x,y):观察到的退化图像
类比理解:就像用沾了水的画笔作画,画笔的形状和水分扩散影响了最终画作的效果。
三、线性移不变(LSI)退化模型
3.1 什么是线性移不变系统?
线性性:系统对多个输入的和的响应等于对各输入响应的和
移不变性:系统对平移后的输入的响应等于对原输入响应的平移
1️⃣案例1:手抖拍照 👈
线性: 照片里亮色衣服和暗色裤子模糊程度一致
移不变:整张照片从左到右模糊程度相同
处理: 用统一参数就能修复
线性移不变 就是在说:整个图像用一种公平、统一的方式变模糊,这样我们就能用数学公式轻松描述和修复它!
3.2 LSI模型的特点
- 系统响应与位置无关(均匀退化)
- 可以通过卷积运算描述
- 在频域中表现为乘法运算
数学表达:
G(u,v) = H(u,v)F(u,v) + N(u,v)其中大写字母表示傅里叶变换后的频域函数
应用实例:
- 相机对焦不准导致的均匀模糊
- 大气湍流对天文图像的影响
四、退化函数的估计
4.1 为什么需要估计退化函数?
图像复原需要先知道"图像是如何变差的",才能"逆向修复"
退化函数又叫做点扩散函数
4.2 估计方法
4.2.1 观察法
- 从图像中清晰的小点或边缘估计PSF
- 适用于有已知简单结构的图像
4.2.2 试验估计法
- 使用相同设备拍摄已知图像(如点光源)
- 分析得到的退化图像来估计h(x,y)
4.2.3 数学建模法
- 根据物理过程建立数学模型
- 如运动模糊、大气湍流等有理论模型
五、平面运动模糊退化模型
——想象你拿着手机边走路边拍照,结果照片拍糊了。这时候如果你知道:
1️⃣ 模糊是怎么产生的(手抖的方向和幅度)
2️⃣ 模糊的数学规律(匀速直线运动造成的拖影)
你就能像侦探一样,通过分析照片的模糊痕迹,逆向还原出清晰的图像!
5.1 模型描述
当相机与被摄物体之间存在相对匀速直线运动时产生的模糊
退化函数:
h(x,y) = { 1/L, if √(x²+y²) ≤ L/2 且 y/x = tanθ
{ 0, otherwise
其中:
L:运动模糊长度
θ:运动方向角度5.2 退化案例演示
import cv2
import numpy as np
import matplotlib.pyplot as plt
# -------------------------- 1. 准备测试图像(简单图形,便于观察模糊效果) --------------------------
def create_test_image(size=(256, 256)):
"""创建简单测试图像(含横线、竖线和对角线,便于观察不同方向模糊)"""
img = np.zeros(size, dtype=np.uint8)
# 添加水平线条(测试垂直模糊效果)
img[50::40, :] = 255 # 行间隔40像素
# 添加垂直线条(测试-45度模糊效果)
img[:, 50::40] = 255 # 列间隔40像素
# 添加对角线条(测试两种模糊的综合效果)
for i in range(0, size[0], 40):
if i + size[1] < 2*size[0]:
cv2.line(img, (0, i), (i, 0), 255, 1)
return img
# 创建测试图像(简单图形比自然图像更易观察模糊方向)
# test_image = create_test_image()
test_image = cv2.imread('./img/peppers.bmp', 0)
# -------------------------- 2. 运动模糊核生成函数 --------------------------
def create_motion_kernel(angle, length):
"""生成指定方向和长度的运动模糊核"""
angle_rad = np.deg2rad(angle)
kernel_size = int(np.ceil(length)) + (1 if int(np.ceil(length)) % 2 == 0 else 0)
kernel = np.zeros((kernel_size, kernel_size), dtype=np.float32)
center = kernel_size // 2
# 生成运动轨迹
for i in range(length):
x = int(center + i * np.cos(angle_rad))
y = int(center + i * np.sin(angle_rad))
if 0 <= x < kernel_size and 0 <= y < kernel_size:
kernel[y, x] += 1
return kernel / np.sum(kernel) # 归一化
# -------------------------- 3. 创建两种方向的模糊核 --------------------------
# 1. 垂直运动模糊核(方向90度,从上到下)
vertical_kernel = create_motion_kernel(angle=90, length=30) # 90度=垂直向下 30表示模糊长度,90表示方向,可以修改的,你可以试试
# 2. -45度运动模糊核(从右上到左下)
diagonal_kernel = create_motion_kernel(angle=-45, length=30) # -45度=右上到左下,0表示模糊长度,-45表示方向,可以修改的,你可以试试
# -------------------------- 4. 应用模糊核退化图像 --------------------------
def apply_blur(image, kernel):
"""对图像应用模糊核"""
return cv2.filter2D(image, ddepth=-1, kernel=kernel, borderType=cv2.BORDER_REFLECT)
# 生成两种模糊图像
vertical_blur = apply_blur(test_image, vertical_kernel) # 垂直模糊
diagonal_blur = apply_blur(test_image, diagonal_kernel) # -45度模糊
# -------------------------- 5. 结果可视化对比 --------------------------
plt.figure(figsize=(15, 10))
# 1. 原始测试图像
plt.subplot(2, 3, 1)
plt.imshow(test_image, cmap='gray')
plt.title('原始测试图像(含横线/竖线/对角线)')
plt.axis('off')
# 2. 垂直模糊核及效果
plt.subplot(2, 3, 2)
plt.imshow(vertical_kernel, cmap='gray')
plt.title('垂直运动模糊核(90度)')
plt.axis('off')
plt.subplot(2, 3, 5)
plt.imshow(vertical_blur, cmap='gray')
plt.title('垂直模糊效果(横线变模糊,竖线清晰)')
plt.axis('off')
# 3. -45度模糊核及效果
plt.subplot(2, 3, 3)
plt.imshow(diagonal_kernel, cmap='gray')
plt.title('-45度运动模糊核')
plt.axis('off')
plt.subplot(2, 3, 6)
plt.imshow(diagonal_blur, cmap='gray')
plt.title('-45度模糊效果(对角线变模糊)')
plt.axis('off')
plt.tight_layout()
plt.show()
# -------------------------- 6. 关键结论 --------------------------
print("\n" + "="*60)
print("运动模糊方向特性分析")
print("="*60)
print("1. 垂直模糊(90度):")
print(" - 模糊核特点:垂直线状(沿y轴方向)")
print(" - 图像效果:水平线条模糊(沿运动方向扩散),垂直线条保持清晰")
print("\n2. -45度模糊:")
print(" - 模糊核特点:沿-45度方向的线状(从右上到左下)")
print(" - 图像效果:与运动方向一致的对角线模糊,其他方向线条相对清晰")
print("="*60)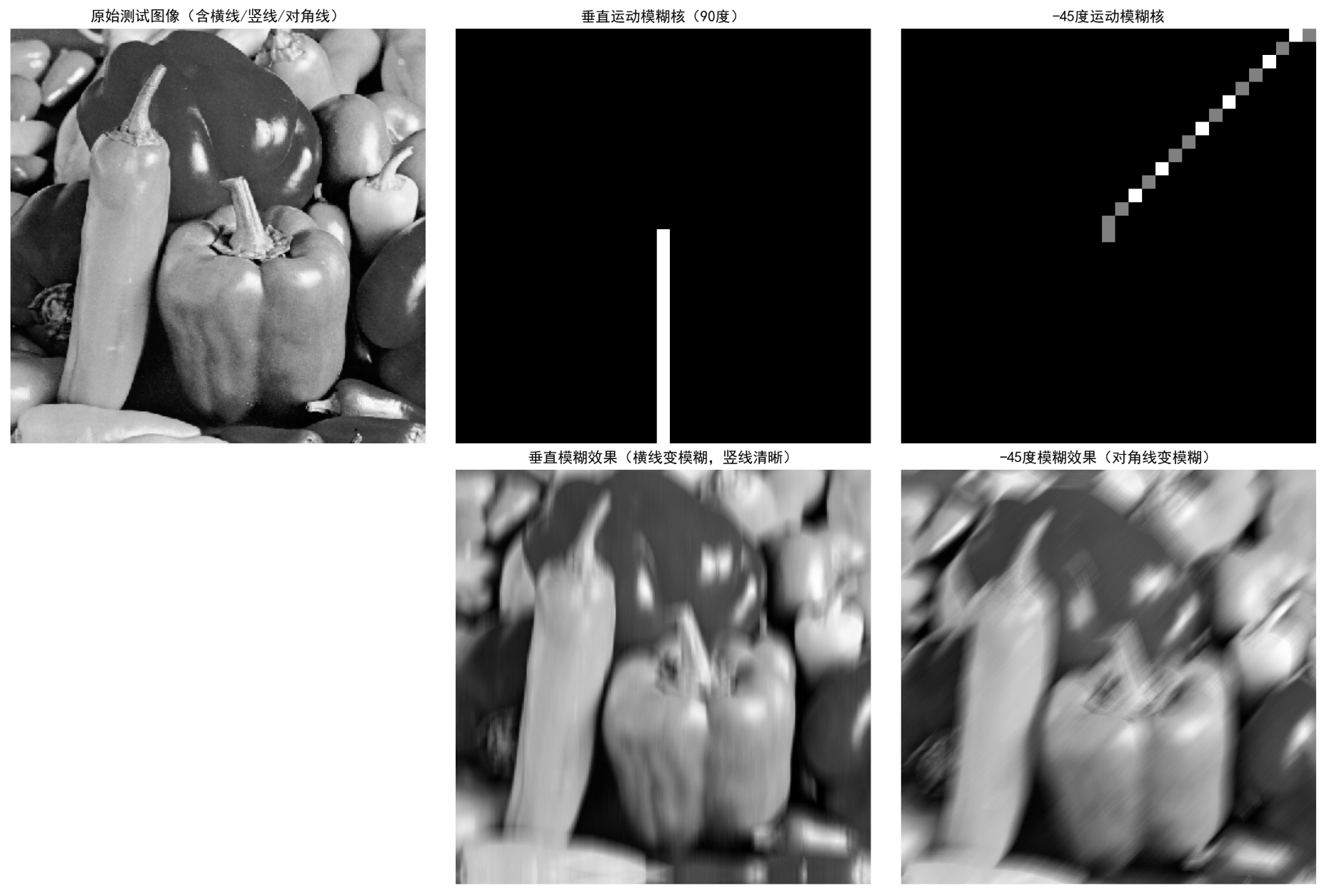
代码解析:
垂直模糊(90度):
- 模糊核特点:垂直线状(沿y轴方向)
- 图像效果:水平线条模糊(沿运动方向扩散),垂直线条保持清晰
-45度模糊:
- 模糊核特点:沿-45度方向的线状(从右上到左下)
- 图像效果:与运动方向一致的对角线模糊,其他方向线条相对清晰
注意:想象一下,模糊核的结构?